ఎ సర్వో మోటార్ లేదా సర్వో అనేది యంత్ర భాగాలను అధిక ఖచ్చితత్వంతో తిప్పడానికి ఉపయోగించే ఒక రకమైన ఎలక్ట్రికల్ మోటార్. ఈ మోటారు మోటారు షాఫ్ట్ యొక్క ప్రస్తుత స్థానంపై అభిప్రాయాన్ని అందించే నియంత్రణ సర్క్యూట్ను కలిగి ఉంటుంది కాబట్టి ఈ ఫీడ్బ్యాక్ ఈ మోటార్లను అధిక ఖచ్చితత్వంతో తిప్పడానికి అనుమతిస్తుంది. ఒక వస్తువును కొంత దూరం లేదా కోణంలో తిప్పడంలో సర్వో మోటార్ ప్రయోజనకరంగా ఉంటుంది. ఈ మోటారును AC సర్వో మోటార్ మరియు DC సర్వో మోటార్ అని రెండు రకాలుగా వర్గీకరించారు. ఒక సర్వో మోటార్ పని చేయడానికి DC శక్తిని ఉపయోగిస్తే, మోటారును DC సర్వో మోటార్ అని పిలుస్తారు, అయితే అది AC శక్తితో పని చేస్తే దానిని AC సర్వో మోటార్ అంటారు. ఈ ట్యుటోరియల్ సంక్షిప్త సమాచారాన్ని అందిస్తుంది DC సర్వో మోటార్ - అప్లికేషన్లతో పని చేయడం.
DC సర్వో మోటార్ అంటే ఏమిటి?
స్థానం, వేగం లేదా త్వరణం వంటి యాంత్రిక అవుట్పుట్ను ఉత్పత్తి చేయడానికి DC ఎలక్ట్రికల్ ఇన్పుట్ను ఉపయోగించే సర్వోమోటర్ను DC సర్వోమోటర్ అంటారు సాధారణంగా, ఈ రకమైన మోటార్లను సంఖ్యాపరంగా నియంత్రించబడే యంత్రాలు, కంప్యూటర్లు మరియు మరెన్నో స్టార్ట్లు & స్టాప్లు చేసిన వాటిలో ప్రైమ్ మూవర్లుగా ఉపయోగిస్తారు. ఖచ్చితంగా & చాలా త్వరగా.

DC సర్వో మోటార్ నిర్మాణం మరియు పని
DC సర్వో మోటార్ క్రింది బ్లాక్ రేఖాచిత్రంలో ఇవ్వబడిన విభిన్న భాగాలతో నిర్మించబడింది. ఈ రేఖాచిత్రంలో, ప్రతి భాగం మరియు దాని పనితీరు క్రింద చర్చించబడ్డాయి.

దీనిలో ఉపయోగించిన మోటారు ఒక సాధారణ DC మోటారు, దాని ఫీల్డ్ వైండింగ్తో సహా విడిగా ఉత్తేజితం అవుతుంది. కాబట్టి ఉత్తేజిత స్వభావాన్ని బట్టి, మరింత ఆర్మేచర్-నియంత్రిత & ఫీల్డ్-నియంత్రిత సర్వో మోటార్లుగా వర్గీకరించవచ్చు.
ఇందులో ఉపయోగించే లోడ్ సాధారణ ఫ్యాన్ లేదా ఇండస్ట్రియల్ లోడ్, ఇది మోటారు యొక్క మెకానికల్ షాఫ్ట్కు అనుసంధానించబడి ఉంటుంది.
అప్లికేషన్ను బట్టి త్వరణం, స్థానం లేదా వేగం వంటి మోటార్ అవుట్పుట్ను మార్చడానికి ఈ నిర్మాణంలోని గేర్బాక్స్ మెకానికల్ ట్రాన్స్డ్యూసర్ లాగా పనిచేస్తుంది.

లోడ్ యొక్క ప్రస్తుత స్థానానికి సమానమైన ఫీడ్బ్యాక్ సిగ్నల్ను పొందడం అనేది పొజిషన్ సెన్సార్ యొక్క ప్రధాన విధి. సాధారణంగా, ఇది గేర్ మెకానిజం ద్వారా మోటార్ షాఫ్ట్ యొక్క సంపూర్ణ కోణానికి అనులోమానుపాతంలో ఉండే వోల్టేజ్ను అందించడానికి ఉపయోగించే పొటెన్షియోమీటర్.
పొజిషన్ సెన్సార్ యొక్క o/pని సరిపోల్చడం & ఎర్రర్ సిగ్నల్ను ఉత్పత్తి చేయడానికి రిఫరెన్స్ పాయింట్ని పోల్చడం కంపారిటర్ ఫంక్షన్ మరియు దానిని యాంప్లిఫైయర్కు అందిస్తుంది. DC మోటార్ ఖచ్చితమైన నియంత్రణతో పనిచేస్తే, అప్పుడు ఎటువంటి లోపం లేదు. స్థానం సెన్సార్, గేర్బాక్స్ & కంపారిటర్ సిస్టమ్ను క్లోజ్డ్ లూప్గా మారుస్తుంది.
యాంప్లిఫైయర్ ఫంక్షన్ కంపారిటర్ నుండి లోపాన్ని విస్తరించడం & DC మోటార్కు ఫీడ్ చేయడం. కాబట్టి, జీరో స్టెడి-స్టేట్ ఎర్రర్ కోసం లాభం ఎక్కడ పటిష్టం చేయబడిందో అది అనుపాత నియంత్రిక వలె పని చేస్తుంది.
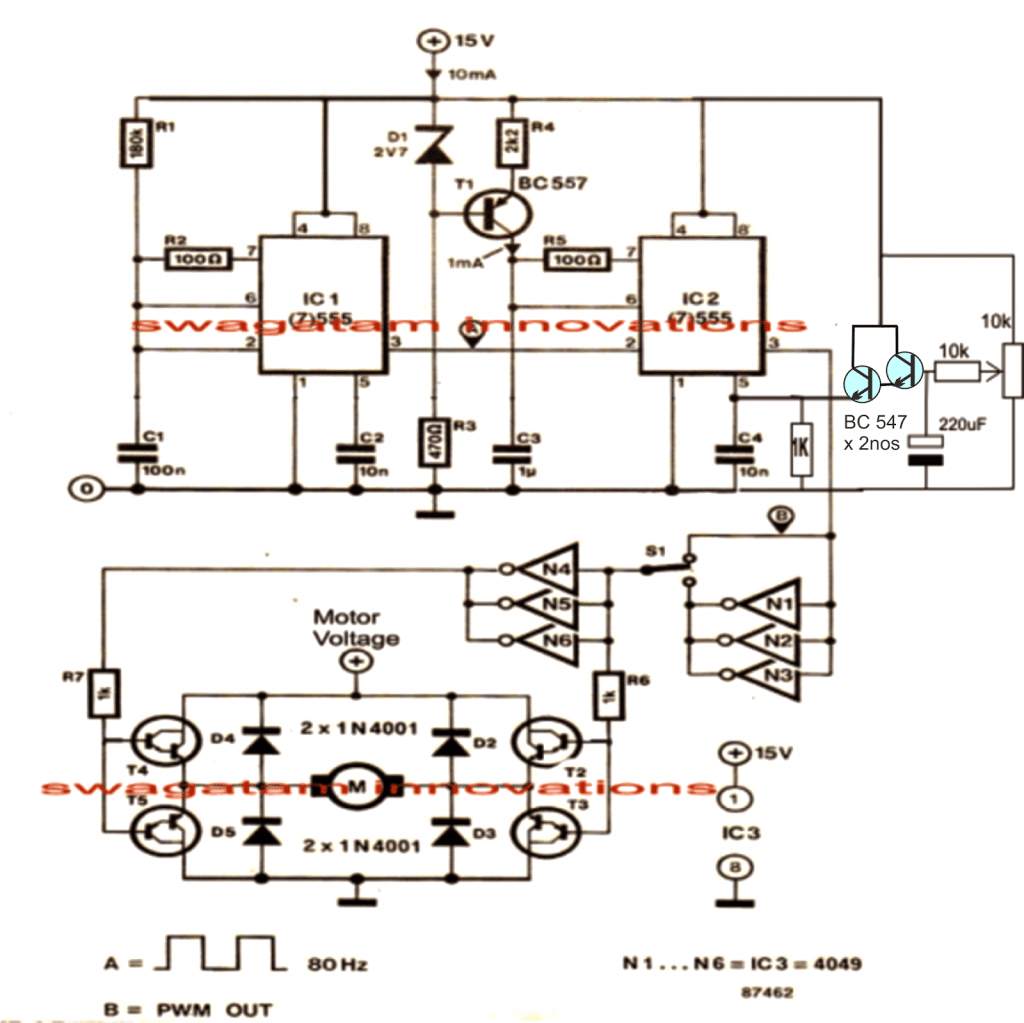
నియంత్రిత సిగ్నల్ ఫీడ్బ్యాక్ సిగ్నల్పై ఆధారపడి PWM (పల్స్ వెడల్పు మాడ్యులేటర్)కి ఇన్పుట్ను ఇస్తుంది, తద్వారా ఇది ఖచ్చితమైన నియంత్రణ కోసం మోటారు ఇన్పుట్ను మాడ్యులేట్ చేస్తుంది లేకపోతే సున్నా స్థిర-స్థితి లోపం. ఇంకా, ఈ పల్స్ వెడల్పు మాడ్యులేటర్ పప్పులను ఉత్పత్తి చేయడానికి రిఫరెన్స్ వేవ్ఫార్మ్ & కంపారేటర్ను ఉపయోగిస్తుంది.
క్లోజ్డ్-లూప్ వ్యవస్థను తయారు చేయడం ద్వారా, త్వరణం, వేగం లేదా ఖచ్చితమైన స్థానం పొందబడుతుంది. పేరు సూచించినట్లుగా, సర్వో మోటార్ అనేది నియంత్రిత మోటారు, ఇది ఫీడ్బ్యాక్ & కంట్రోలర్ ప్రభావం కారణంగా ప్రాధాన్య అవుట్పుట్ను అందిస్తుంది. ఎర్రర్ సిగ్నల్ కేవలం విస్తరించబడింది & సర్వో మోటార్ను నడపడానికి ఉపయోగించబడుతుంది. నియంత్రణ సిగ్నల్ & పల్స్ వెడల్పు మాడ్యులేటర్-ఉత్పత్తి చేసే స్వభావంపై ఆధారపడి, ఈ మోటార్లు FPGA చిప్స్ లేదా డిజిటల్ సిగ్నల్ ప్రాసెసర్లతో ఉన్నతమైన నియంత్రిత పద్ధతులను కలిగి ఉంటాయి.
DC సర్వో మోటార్ యొక్క పని; dc మోటారుకు ఇన్పుట్ సిగ్నల్ వర్తించినప్పుడల్లా అది షాఫ్ట్ & గేర్లను తిప్పుతుంది. కాబట్టి ప్రాథమికంగా, గేర్స్ అవుట్పుట్ యొక్క భ్రమణ స్థానం సెన్సార్ (పొటెన్షియోమీటర్)కి తిరిగి అందించబడుతుంది, దీని గుబ్బలు వాటి నిరోధకతను మారుస్తాయి మరియు మారుస్తాయి. ప్రతిఘటనను మార్చినప్పుడల్లా వోల్టేజ్ మార్చబడుతుంది, ఇది కంట్రోలర్లోకి ఫీడ్ చేయబడిన ఎర్రర్ సిగ్నల్ & తత్ఫలితంగా PWM ఉత్పత్తి అవుతుంది.
DC సర్వో మోటార్ల రకాల గురించి మరింత తెలుసుకోవడానికి, దయచేసి ఈ లింక్ని చూడండి: వివిధ రకాలైన సర్వో మోటార్లు .
DC సర్వో మోటార్ యొక్క బదిలీ ఫంక్షన్
బదిలీ ఫంక్షన్ను o/p వేరియబుల్ యొక్క లాప్లేస్ ట్రాన్స్ఫార్మ్ (LT)కి LTకి నిష్పత్తిగా నిర్వచించవచ్చు ( లాప్లేస్ రూపాంతరం ) i/p వేరియబుల్. సాధారణంగా, DC మోటార్ శక్తిని ఎలక్ట్రికల్ నుండి మెకానికల్గా మారుస్తుంది. ఆర్మేచర్ టెర్మినల్స్ వద్ద సరఫరా చేయబడిన విద్యుత్ శక్తి నియంత్రిత యాంత్రిక శక్తిగా మార్చబడుతుంది.
ఆర్మేచర్-నియంత్రిత DC సర్వో మోటార్ బదిలీ ఫంక్షన్ క్రింద చూపబడింది.

θ(లు)/Va(లు) = (K1/(Js2 + Bs)*(Las + Ra)) /1 + (K1KbKs)/(Js2 + Bs)*(లాస్+రా)
ఫీల్డ్-నియంత్రిత dc సర్వోమోటర్ బదిలీ ఫంక్షన్ క్రింద చూపబడింది.

θ(లు)/Vf (లు) = Kf / (sLf + Rf) * (s2J + Bs)
ఓపెన్-లూప్ సిస్టమ్ అయిన ఫీల్డ్ కంట్రోల్డ్ డిసి సర్వో మోటార్తో పోల్చినప్పుడు క్లోజ్డ్-లూప్ సిస్టమ్ కారణంగా ఆర్మ్చర్-నియంత్రిత డిసి సర్వో మోటార్ అత్యుత్తమ పనితీరును అందిస్తుంది. అదనంగా, ఫీల్డ్ కంట్రోల్ సిస్టమ్లో ప్రతిస్పందన వేగం నెమ్మదిగా ఉంటుంది. ఆర్మేచర్ నియంత్రిత సందర్భంలో, ఆర్మేచర్ యొక్క ఇండక్టెన్స్ చాలా తక్కువగా ఉంటుంది, అయితే, ఫీల్డ్ కంట్రోల్ సందర్భంలో, ఇది ఒకేలా ఉండదు. కానీ, ఇన్ఫీల్డ్ నియంత్రణలో, మెరుగైన డంపింగ్ సాధించలేము, అయితే, ఆర్మేచర్ నియంత్రణలో, దీనిని సాధించవచ్చు.
స్పెసిఫికేషన్లు
DC సర్వో మోటార్ కింది వాటిని కలిగి ఉన్న పనితీరు నిర్దేశాలను అందిస్తుంది. ఈ స్పెసిఫికేషన్లు మోటారును సరిగ్గా పరిమాణం చేయడానికి అప్లికేషన్ యొక్క లోడ్ అవసరాల ఆధారంగా సరిపోలాలి.
- షాఫ్ట్ వేగం కేవలం RPM (నిమిషానికి భ్రమణాలు)లో వ్యక్తీకరించబడిన షాఫ్ట్ తిరిగే వేగాన్ని నిర్వచిస్తుంది.
- సాధారణంగా, తయారీదారు అందించే వేగం o/p షాఫ్ట్ యొక్క నో-లోడ్ వేగం లేదా మోటారు యొక్క అవుట్పుట్ టార్క్ సున్నాగా ఉండే వేగం.
- టెర్మినల్ వోల్టేజ్ అనేది మోటారు వేగాన్ని నిర్ణయించే మోటారు డిజైన్ వోల్టేజ్. ఈ వేగం మోటారుకు సరఫరా చేయబడిన వోల్టేజీని పెంచడం లేదా తగ్గించడం ద్వారా నియంత్రించబడుతుంది.
- టార్క్ వంటి భ్రమణ శక్తి dc సర్వో మోటార్ యొక్క షాఫ్ట్ ద్వారా ఉత్పత్తి చేయబడుతుంది. కాబట్టి, ఈ మోటారుకు అవసరమైన టార్క్ కేవలం లక్ష్య అప్లికేషన్లో అనుభవించిన వివిధ లోడ్ల యొక్క స్పీడ్-టార్క్ లక్షణాల ద్వారా నిర్ణయించబడుతుంది. ఈ టార్క్లు రెండు రకాల ప్రారంభ టార్క్ మరియు నిరంతర టార్క్.
- సర్వో మోటార్ను ప్రారంభించేటప్పుడు ప్రారంభ టార్క్ అవసరమైన టార్క్. నిరంతర టార్క్తో పోలిస్తే ఈ టార్క్ సాధారణంగా ఎక్కువగా ఉంటుంది.
- నిరంతర టార్క్ అనేది అవుట్పుట్ టార్క్, ఇది స్థిరంగా నడుస్తున్న పరిస్థితులలో మోటారు సామర్థ్యం.
- ఈ మోటార్లు తప్పనిసరిగా లోడ్ అవసరాల మధ్య 20 నుండి 30% మార్జిన్తో పాటు విశ్వసనీయతను నిర్ధారించడానికి మోటార్ రేటింగ్లతో పాటు అప్లికేషన్ కోసం తగినంత వేగం & టార్క్ సామర్థ్యాన్ని కలిగి ఉండాలి. ఈ మార్జిన్లు చాలా ఎక్కువగా ఉన్నప్పుడు ఖర్చు ప్రభావం తగ్గుతుంది Faulhaber నుండి 12V DC కోర్లెస్ DC సర్వో మోటార్ యొక్క లక్షణాలు ఉన్నాయి:
- గేర్బాక్స్ నిష్పత్తి 64: l ప్లానెటరీ త్రీ స్టేజ్ గేర్ బాక్స్.
- లోడ్ కరెంట్ 1400 mA పవర్.
- శక్తి 17W.
- వేగం 120RPM.
- లోడ్ కరెంట్ 75mA లేదు.
- ఎన్కోడర్ రకం ఆప్టికల్.
- ఎన్కోడర్ యొక్క రిజల్యూషన్ O/P షాఫ్ట్ యొక్క 768CPR.
- వ్యాసం 30 మిమీ.
- పొడవు 42 మిమీ.
- మొత్తం పొడవు 85 మిమీ.
- షాఫ్ట్ వ్యాసం 6 మిమీ.
- షాఫ్ట్ పొడవు 35 మిమీ.
- స్టాల్ టార్క్ 52kgcm.
లక్షణాలు
ది DC సర్వో మోటార్ యొక్క లక్షణాలు కింది వాటిని చేర్చండి.
- DC సర్వో మోటార్ డిజైన్ శాశ్వత అయస్కాంతం లేదా విడిగా ఉత్తేజిత DC మోటార్ను పోలి ఉంటుంది.
- ఆర్మేచర్ వోల్టేజీని నియంత్రించడం ద్వారా ఈ మోటారు వేగ నియంత్రణ జరుగుతుంది.
- సర్వో మోటార్ అధిక ఆర్మేచర్ నిరోధకతతో రూపొందించబడింది.
- ఇది శీఘ్ర టార్క్ ప్రతిస్పందనను అందిస్తుంది.
- ఆర్మేచర్ వోల్టేజ్లో ఒక దశ మార్పు మోటార్ వేగంలో త్వరిత మార్పును సృష్టిస్తుంది.
AC సర్వో మోటార్ Vs DC సర్వో మోటార్
DC సర్వో మోటార్ మరియు AC సర్వో మోటార్ మధ్య వ్యత్యాసం క్రింది వాటిని కలిగి ఉంటుంది.
|
AC సర్వో మోటార్ |
DC సర్వో మోటార్ |
| మెకానికల్ అవుట్పుట్ను ఉత్పత్తి చేయడానికి AC ఎలక్ట్రికల్ ఇన్పుట్ను ఉపయోగించే ఒక రకమైన సర్వోమోటర్ను AC సర్వో మోటార్ అంటారు. | మెకానికల్ అవుట్పుట్ను ఉత్పత్తి చేయడానికి DC ఎలక్ట్రికల్ ఇన్పుట్ను ఉపయోగించే ఒక రకమైన సర్వోమోటర్ను DC సర్వో మోటార్ అంటారు. |
| AC సర్వో మోటార్ తక్కువ అవుట్పుట్ శక్తిని అందిస్తుంది. | DC సర్వో మోటార్ అధిక అవుట్పుట్ శక్తిని అందిస్తుంది. |
| ఈ మోటార్లు హై-స్పీడ్ ఆపరేటింగ్ పరిస్థితులకు సర్దుబాటు చేయగలవు. | ఈ మోటార్లు తక్కువ-వేగం ఆపరేటింగ్ పరిస్థితులకు సర్దుబాటు చేయగలవు. |
| ఈ రకమైన మోటార్లు అధిక టార్క్ను అభివృద్ధి చేస్తాయి. | ఈ రకమైన మోటార్లు తక్కువ టార్క్ను అభివృద్ధి చేస్తాయి. |
| ఈ మోటారు యొక్క ఆపరేషన్ స్థిరంగా, మృదువైనది మరియు తక్కువ శబ్దం ఆధారితమైనది. | ఈ మోటారు యొక్క ఆపరేషన్ తక్కువ స్థిరంగా మరియు ధ్వనించేదిగా ఉంటుంది. |
| ఈ మోటార్లు తక్కువ సామర్థ్యాన్ని కలిగి ఉంటాయి. | ఈ మోటార్లు అధిక సామర్థ్యాన్ని కలిగి ఉంటాయి. |
| ఈ మోటార్లు తక్కువ స్థిరత్వ సమస్యలను కలిగి ఉంటాయి. | ఈ మోటార్లు మరింత స్థిరత్వ సమస్యలను కలిగి ఉంటాయి. |
| ఈ మోటార్లలో ఎలక్ట్రానిక్ నాయిస్ సమస్య ఉండదు. | ఈ మోటార్లలో, బ్రష్లు ఉండటం వల్ల ఎలక్ట్రానిక్ శబ్దం సమస్య ఉంది. |
| ఈ మోటార్ల నిర్వహణ తక్కువ. | బ్రష్లు & కమ్యుటేటర్ ఉన్నందున ఈ మోటార్ల నిర్వహణ ఎక్కువగా ఉంటుంది. |
| ఇవి తేలికైనవి మరియు చిన్న సైజులలో ఉంటాయి. | ఇవి భారీ మరియు పెద్ద పరిమాణంలో ఉంటాయి. |
| ఈ మోటార్లు తక్కువ-శక్తి-ఆధారిత అనువర్తనాలకు తగినవి. | ఈ మోటార్లు అధిక-శక్తి-ఆధారిత అనువర్తనాలకు తగినవి. |
ఆర్డునోతో DC సర్వో మోటార్ ఇంటర్ఫేసింగ్
ఖచ్చితమైన మరియు అవసరమైన కోణంలో DC సర్వో మోటారును నియంత్రించడానికి, Arduino బోర్డు/ఏదైనా ఇతర మైక్రోకంట్రోలర్ను ఉపయోగించవచ్చు. ఈ బోర్డ్ అనలాగ్ o/pని కలిగి ఉంది, ఇది సర్వో మోటార్ను ఖచ్చితమైన కోణంలో తిప్పడానికి PWM సిగ్నల్ను ఉత్పత్తి చేస్తుంది. మీరు ఆర్డునో ఉపయోగించి పొటెన్షియోమీటర్ లేదా పుష్ బటన్లతో సర్వో మోటార్ యొక్క యాంగిల్ పొజిషన్ను కూడా తరలించవచ్చు.
సర్వో మోటార్ను సులభంగా అందుబాటులో ఉండే IR రిమోట్తో కూడా నియంత్రించవచ్చు. ఈ రిమోట్ dc సర్వో మోటార్ను ఒక నిర్దిష్ట కోణానికి తరలించడానికి లేదా IR రిమోట్తో మోటారు యొక్క కోణాన్ని సరళంగా పెంచడానికి లేదా తగ్గించడానికి సహాయపడుతుంది.
ఒక నిర్దిష్ట కోణంలో Arduino ఉపయోగించి IR రిమోట్ని ఉపయోగించి సర్వో మోటార్ను ఎలా తరలించాలో మరియు రిమోట్ సవ్యదిశలో మరియు అపసవ్య దిశలో సర్వో మోటార్ యొక్క కోణాన్ని పెంచడం లేదా తగ్గించడం గురించి ఇక్కడ మేము చర్చిస్తాము. Arduino మరియు IR రిమోట్తో DC సర్వో మోటార్ యొక్క ఇంటర్ఫేసింగ్ రేఖాచిత్రం క్రింద చూపబడింది. ఈ ఇంటర్ఫేసింగ్ యొక్క కనెక్షన్లు ఇలా అనుసరించబడతాయి;

ఈ ఇంటర్ఫేసింగ్ ప్రధానంగా dc సర్వో మోటార్, Arduino బోర్డ్ మరియు TSOP1738 IR సెన్సార్ వంటి మూడు ముఖ్యమైన భాగాలను ఉపయోగిస్తుంది. ఈ సెన్సార్ Vcc, GND & అవుట్పుట్ వంటి మూడు టెర్మినల్స్ను కలిగి ఉంది. ఈ సెన్సార్ యొక్క Vcc టెర్మినల్ Arduino Uno బోర్డ్ యొక్క 5Vకి కనెక్ట్ చేయబడింది, ఈ సెన్సార్ యొక్క GND టెర్మినల్ Arduino బోర్డ్ యొక్క GND టెర్మినల్కు కనెక్ట్ చేయబడింది & అవుట్పుట్ టెర్మినల్ Arduino బోర్డు యొక్క పిన్ 12 (డిజిటల్ ఇన్పుట్)కి కనెక్ట్ చేయబడింది.
డిజిటల్ అవుట్పుట్ పిన్ 5 మోటారును నడపడానికి సర్వో మోటార్ యొక్క సిగ్నల్ ఇన్పుట్ పిన్కు కనెక్ట్ చేయబడింది
dc సర్వో మోటార్ +ve పిన్ బాహ్య 5V సరఫరాకు ఇవ్వబడింది మరియు సర్వో మోటార్ యొక్క GND పిన్ Arduino యొక్క GND పిన్కు ఇవ్వబడుతుంది.
పని చేస్తోంది
IR రిమోట్ రెండు చర్యలను 30 డిగ్రీలు, 60 డిగ్రీలు మరియు 90 డిగ్రీలు చేయడానికి మరియు మోటార్ కోణాన్ని 0 నుండి 180 డిగ్రీల వరకు పెంచడానికి/తగ్గించడానికి కూడా ఉపయోగించబడుతుంది.
రిమోట్లో అంకెల బటన్లు (0-9), యాంగిల్ కంట్రోల్ కోసం బటన్లు, బాణం కీ బటన్లు, అప్/డౌన్ బటన్లు మొదలైన అనేక బటన్లు ఉన్నాయి. 1 - 5 నుండి ఏదైనా అంకెల బటన్ నొక్కిన తర్వాత, dc సర్వో మోటార్ దానికి కదులుతుంది. ఖచ్చితమైన కోణం మరియు యాంగిలప్/డౌన్ బటన్ను నొక్కినప్పుడు మోటారు యొక్క కోణాన్ని ఖచ్చితంగా ±5 డిగ్రీల వద్ద సెట్ చేయవచ్చు.
బటన్లను నిర్ణయించిన తర్వాత ఈ బటన్ల కోడ్లను డీకోడ్ చేయాలి. రిమోట్ నుండి ఏదైనా బటన్ నొక్కిన తర్వాత, అవసరమైన చర్యను నిర్వహించడానికి అది ఒక కోడ్ని పంపుతుంది. ఈ రిమోట్ కోడ్లను డీకోడ్ చేయడానికి, ఇంటర్నెట్ నుండి IR రిమోట్ లైబ్రరీ ఉపయోగించబడుతుంది.
కింది ప్రోగ్రామ్ను Arduino లోకి అప్లోడ్ చేయండి & IR సెన్సార్ను కనెక్ట్ చేయండి. ఇప్పుడు రిమోట్ను IR సెన్సార్ వైపు ఉంచండి & బటన్ను నొక్కండి. ఆ తర్వాత, సీరియల్ మానిటర్ను తెరిచి, సంఖ్యల రూపంలో నొక్కిన బటన్ కోడ్ను పర్యవేక్షించండి.
Arduino కోడ్
#include
#include
సర్వీస్ సర్వీస్1;
Int IRpin = 12; // IR సెన్సార్ కోసం పిన్
Int motor_angle=0;
IRrecv irrecv (IRpin);
డీకోడ్_ఫలితాల ఫలితాలు;
శూన్యమైన సెటప్()
{
సీరియల్.బిగిన్(9600); // సీరియల్ కమ్యూనికేషన్ను ప్రారంభించండి
Serial.println('IR రిమోట్ కంట్రోల్డ్ సర్వో మోటార్'); // ప్రదర్శన సందేశం
irrecv.enableIRIN(); // రిసీవర్ను ప్రారంభించండి
servo1.attach(5); // సర్వో మోటార్ పిన్ను ప్రకటించండి
servo1.write(motor_angle); // మోటారును 0 డిగ్రీకి తరలించండి
Serial.println(“సర్వో మోటార్ యాంగిల్ 0 డిగ్రీ”);
ఆలస్యం (2000);
}
శూన్య లూప్()
{
అయితే(!(irrecv.decode(&results))); // బటన్ నొక్కే వరకు వేచి ఉండండి
ఒకవేళ (irrecv.decode(&ఫలితాలు)) // బటన్ నొక్కినప్పుడు మరియు కోడ్ స్వీకరించబడినప్పుడు
{
if(results.value==2210) // అంకె 1 బటన్ నొక్కబడిందో లేదో తనిఖీ చేయండి
{
Serial.println('సర్వో మోటార్ కోణం 30 డిగ్రీలు');
మోటార్_యాంగిల్ = 30;
servo1.write(motor_angle); // మోటారును 30 డిగ్రీలకు తరలించండి
}
else if(results.value==6308) // అంకె 2 బటన్ నొక్కితే
{
Serial.println('సర్వో మోటార్ కోణం 60 డిగ్రీలు');
మోటార్_యాంగిల్ = 60;
servo1.write(motor_angle); // మోటారును 60 డిగ్రీలకు తరలించండి
}
else if(results.value==2215) // అన్ని అంకెల బటన్లకు వారీగా ఉంటుంది
{
Serial.println('సర్వో మోటార్ కోణం 90 డిగ్రీలు');
మోటార్_యాంగిల్ = 90;
servo1.write(motor_angle);
}
లేకపోతే (ఫలితాలు.విలువ==6312)
{
Serial.println('సర్వో మోటార్ కోణం 120 డిగ్రీలు');
మోటార్_యాంగిల్ = 120;
servo1.write(motor_angle);
}
లేకపోతే (ఫలితాలు. విలువ==2219)
{
Serial.println('సర్వో మోటార్ కోణం 150 డిగ్రీలు');
మోటార్_యాంగిల్ = 150;
servo1.write(motor_angle);
}
else if(results.value==6338) // వాల్యూమ్ UP బటన్ నొక్కితే
{
if(motor_angle<150) motor_angle+=5; // మోటారు కోణాన్ని పెంచండి
Serial.print('మోటారు కోణం ');
Serial.println(motor_angle);
servo1.write(motor_angle); // మరియు మోటారును ఆ కోణానికి తరలించండి
}
else if(results.value==6292) // వాల్యూమ్ డౌన్ బటన్ నొక్కితే
{
if(motor_angle>0) motor_angle-=5; // మోటారు కోణాన్ని తగ్గించండి
Serial.print('మోటారు కోణం ');
Serial.println(motor_angle);
servo1.write(motor_angle); // మరియు మోటారును ఆ కోణానికి తరలించండి
}
ఆలస్యం (200); // 0.2 సెకన్లు వేచి ఉండండి
irrecv.resume(); // తదుపరి కోడ్ని స్వీకరించడానికి మళ్లీ సిద్ధంగా ఉండండి
}
}
DC సర్వో మోటార్కు సరఫరా బాహ్య 5V నుండి అందించబడింది & IR సెన్సార్ & Arduino బోర్డ్కు సరఫరా USB నుండి అందించబడింది. సర్వో మోటార్కు పవర్ ఇచ్చిన తర్వాత అది 0 డిగ్రీలకు కదులుతుంది. ఆ తర్వాత, సీరియల్ మానిటర్లో “సర్వో మోటార్ కోణం 0 డిగ్రీ” అని సందేశం ప్రదర్శించబడుతుంది.
ఇప్పుడు రిమోట్లో, బటన్ 1 నొక్కిన తర్వాత dc సర్వో మోటార్ 30 డిగ్రీలు కదులుతుంది. అదేవిధంగా, 2, 3, 4, లేదా 5 వంటి బటన్లను నొక్కిన తర్వాత మోటారు 60 డిగ్రీలు, 90 డిగ్రీలు, 120 డిగ్రీలు లేదా 150 డిగ్రీల వంటి కావలసిన కోణాలతో కదులుతుంది. ఇప్పుడు, సీరియల్ మానిటర్ సర్వో మోటార్ యొక్క యాంగిల్ స్థానాన్ని “సర్వో మోటార్ యాంగిల్ xx డిగ్రీలు”గా ప్రదర్శిస్తుంది.
వాల్యూమ్ అప్ బటన్ను నొక్కిన తర్వాత, మోటారు కోణం 5 డిగ్రీలు పెరుగుతుంది, అంటే అది 60 డిగ్రీలు అయితే, అది 65 డిగ్రీలకు కదులుతుంది. కాబట్టి, కొత్త కోణం యొక్క స్థానం సీరియల్ మానిటర్లో ప్రదర్శించబడుతుంది.
అదేవిధంగా, యాంగిల్ డౌన్ బటన్ను ఒకసారి నొక్కిన తర్వాత, మోటారు యొక్క కోణం 5 డిగ్రీలు తగ్గుతుంది, అంటే కోణం 90 డిగ్రీలు అయితే, అది 85 డిగ్రీలకు కదులుతుంది. IR రిమోట్ నుండి సిగ్నల్ IR సెన్సార్ ద్వారా గ్రహించబడుతుంది. ఇది ఎలా గ్రహిస్తుంది మరియు IR సెన్సార్ ఎలా పని చేస్తుందో తెలుసుకోవడానికి క్లిక్ చేయండి ఇక్కడ
కాబట్టి, కొత్త కోణం యొక్క స్థానం సీరియల్ మానిటర్లో ప్రదర్శించబడుతుంది. అందువల్ల, మేము ఆర్డునో & ఐఆర్ రిమోట్తో డిసి సర్వో మోటర్ యొక్క కోణాన్ని సులభంగా నియంత్రించవచ్చు.
8051 మైక్రోకంట్రోలర్తో DC మోటార్ను ఎలా ఇంటర్ఫేస్ చేయాలో తెలుసుకోవడానికి క్లిక్ చేయండి ఇక్కడ
DC సర్వో మోటార్ యొక్క ప్రయోజనాలు
ది DC సర్వో మోటార్స్ యొక్క ప్రయోజనాలు కింది వాటిని చేర్చండి.
- DC సర్వో మోటార్ ఆపరేషన్ స్థిరంగా ఉంది.
- ఈ మోటార్లు మోటారు పరిమాణం & బరువు కంటే చాలా ఎక్కువ అవుట్పుట్ శక్తిని కలిగి ఉంటాయి.
- ఈ మోటార్లు అధిక వేగంతో నడుస్తున్నప్పుడు అవి ఎటువంటి శబ్దాన్ని ఉత్పత్తి చేయవు.
- ఈ మోటారు ఆపరేషన్ వైబ్రేషన్ & ప్రతిధ్వని రహితంగా ఉంటుంది.
- ఈ రకమైన మోటార్లు అధిక టార్క్ మరియు జడత్వ నిష్పత్తిని కలిగి ఉంటాయి & అవి చాలా త్వరగా లోడ్లను అందుకోగలవు.
- వారు అధిక సామర్థ్యాన్ని కలిగి ఉంటారు.
- వారు శీఘ్ర ప్రతిస్పందనలను ఇస్తారు.
- ఇవి పోర్టబుల్ & తేలికైనవి.
- నాలుగు క్వాడ్రాంట్ల ఆపరేషన్ సాధ్యమే.
- అధిక వేగంతో, ఇవి వినగలిగేలా నిశ్శబ్దంగా ఉంటాయి.
ది DC సర్వో మోటార్లు యొక్క ప్రతికూలతలు కింది వాటిని చేర్చండి.
- DC సర్వో మోటార్ యొక్క శీతలీకరణ విధానం అసమర్థమైనది. కాబట్టి ఈ మోటారు వెంటిలేట్ అయిన తర్వాత త్వరగా కలుషితమవుతుంది.
- ఈ మోటారు అధిక టార్క్ వేగంతో గరిష్ట అవుట్పుట్ శక్తిని ఉత్పత్తి చేస్తుంది & సాధారణ గేరింగ్ అవసరం.
- ఈ మోటార్లు ఓవర్లోడ్తో పాడైపోతాయి.
- వాటికి సంక్లిష్టమైన డిజైన్ ఉంది & ఎన్కోడర్ అవసరం.
- ఫీడ్బ్యాక్ లూప్ను స్థిరీకరించడానికి ఈ మోటార్లకు ట్యూనింగ్ అవసరం.
- దీనికి నిర్వహణ అవసరం.
DC సర్వో మోటార్ అప్లికేషన్స్
ది DC సర్వో మోటార్లు అప్లికేషన్లు కింది వాటిని చేర్చండి.
- DC సర్వో మోటార్లు లోహాన్ని కత్తిరించడానికి మరియు రూపొందించడానికి యంత్ర పరికరాలలో ఉపయోగిస్తారు.
- ఇవి యాంటెన్నా పొజిషనింగ్, ప్రింటింగ్, ప్యాకేజింగ్, చెక్క పని, వస్త్రాలు, పురిబెట్టు లేదా తాడు తయారీ, CMM (కోఆర్డినేట్ కొలిచే యంత్రాలు), మెటీరియల్లను నిర్వహించడం, నేలను పాలిష్ చేయడం, తలుపులు తెరవడం, X-Y టేబుల్, వైద్య పరికరాలు మరియు పొర స్పిన్నింగ్ కోసం ఉపయోగిస్తారు.
- ఈ మోటార్లు ఎయిర్క్రాఫ్ట్ కంట్రోల్ సిస్టమ్లలో ఉపయోగించబడతాయి, ఇక్కడ స్థలం & బరువు పరిమితులు ప్రతి యూనిట్ వాల్యూమ్కు అధిక శక్తిని అందించడానికి మోటార్లు అవసరం.
- బ్లోవర్ డ్రైవ్లు & ఫ్యాన్ల వంటి అధిక ప్రారంభ టార్క్ అవసరమైన చోట ఇవి వర్తిస్తాయి.
- ఇవి ప్రధానంగా రోబోటిక్స్, ప్రోగ్రామింగ్ పరికరాలు, ఎలక్ట్రోమెకానికల్ యాక్యుయేటర్లు, మెషిన్ టూల్స్, ప్రాసెస్ కంట్రోలర్లు మొదలైన వాటికి కూడా ఉపయోగించబడతాయి.
కాబట్టి, ఇది dc యొక్క అవలోకనం సర్వో మోటార్ - పని చేస్తుంది అప్లికేషన్లతో. ఈ సర్వో మోటార్లు అనేక యాంత్రిక కదలికలకు పరిష్కారాన్ని అందించడానికి వివిధ పరిశ్రమలలో ఉపయోగించబడతాయి. ఈ మోటార్లు యొక్క లక్షణాలు వాటిని చాలా సమర్థవంతంగా మరియు శక్తివంతమైనవిగా చేస్తాయి. ఇక్కడ మీ కోసం ఒక ప్రశ్న ఉంది, AC సర్వో మోటార్ అంటే ఏమిటి?