పోస్ట్ హాల్ ఎఫెక్ట్ సెన్సార్ నెట్వర్క్ ద్వారా RPM ఫీడ్బ్యాక్ సిగ్నల్ లూప్ను ఉపయోగించి ఎలక్ట్రానిక్ ఇంజిన్ స్పీడ్ గవర్నర్ లేదా కంట్రోలర్ సర్క్యూట్ను చర్చిస్తుంది. ఈ ఆలోచనను మిస్టర్ ఇమ్సా నాగా అభ్యర్థించారు.
సర్క్యూట్ లక్ష్యాలు మరియు అవసరాలు
- మీ సమయానికి చాలా ధన్యవాదాలు. ఈ సర్క్యూట్ ఒకే దశ సరఫరాకు అనుకూలంగా ఉంటుందని నేను నమ్ముతున్నాను. నా ఆల్టర్నేటర్ 3 ఫేజ్ 7 కెవిఎ మరియు నేను దీనిని డీజిల్ వెహికల్ ఇంజిన్తో స్పీడ్ గవర్నర్కు బదులుగా యాక్సిలరేటర్ కలిగి ఉండాలనుకుంటున్నాను.
- నేను అమలు చేయాలనుకుంటున్నది - ఒక 'ఎలెక్ట్రానిక్ ఇంజిన్ స్పీడ్ గవర్నర్', ఇది ఎలక్ట్రానిక్ సర్వో నియంత్రిత యంత్రాంగాన్ని కలిగి ఉంటుంది- ఎ స్పీడ్ సెన్సార్ సర్క్యూట్ (ఇంజిన్ RPM సెన్సార్) ఒక సర్వో మోటారును నడపడానికి యాక్సిలరేటర్ మెకానిజమ్ను నిర్వహించడానికి ఆల్టర్నేటర్కు వర్తించే లోడ్కు సంబంధించి ఇంజిన్ యొక్క స్థిరమైన వేగం.
- ఇది ఫ్రీక్వెన్సీని అలాగే జనరేటర్ యొక్క వోల్టేజ్ నిలుపుకోవడంలో సహాయపడుతుంది. సర్వో మోటారును నియంత్రించడానికి మీరు ఒక సర్క్యూట్ను రూపకల్పన చేస్తే, ఇంజిన్ RPM లో మార్పుకు సంబంధించి ఇరువైపులా తిప్పగలిగే విధంగా నేను యాంత్రిక అంశాన్ని జాగ్రత్తగా చూసుకోగలను. Ation హించి చాలా ధన్యవాదాలు.
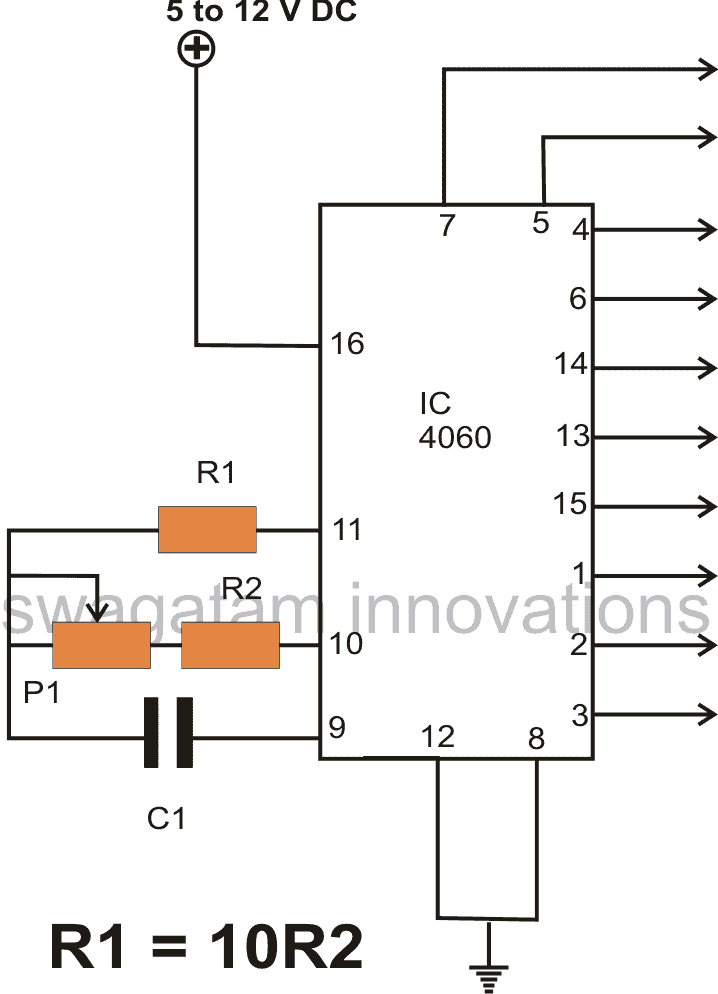
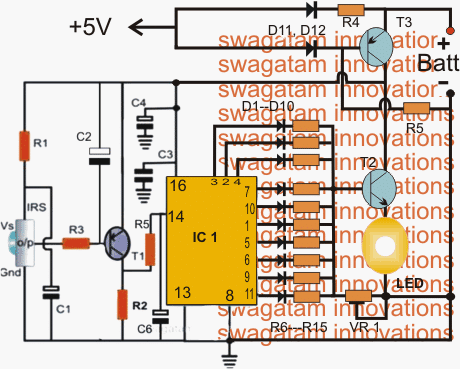
సర్క్యూట్ రేఖాచిత్రం

గమనిక: మోటారు 12 V SPRING లోడెడ్ సోలెనాయిడ్తో భర్తీ చేయబడుతుంది
డిజైన్
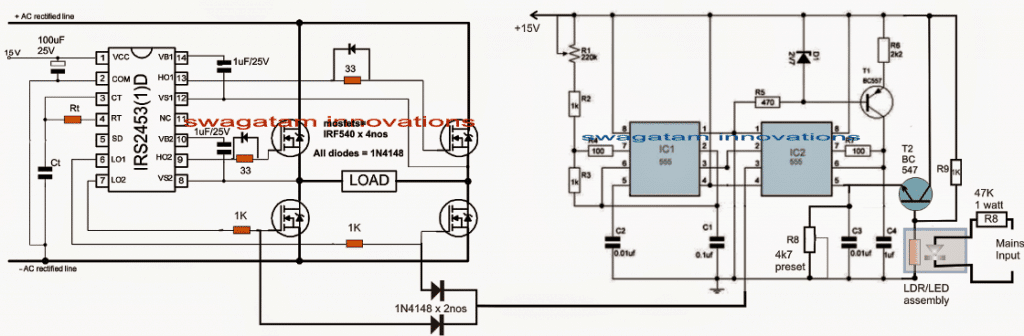
డీజిల్ ఇంజిన్ స్పీడ్ గవర్నర్ లేదా కంట్రోలర్ యొక్క సర్క్యూట్ పై చిత్రంలో చూడు RPM ప్రాసెసర్ లేదా a టాకోమీటర్ సర్క్యూట్
ఎడమ వైపు IC1 555 దశ ఒక సాధారణ టాకోమీటర్ సర్క్యూట్ను ఏర్పరుస్తుంది, ఇది a తో కాన్ఫిగర్ చేయబడింది హాల్ ఎఫెక్ట్ సెన్సార్ దాని RPM రేటును గ్రహించడం కోసం ఇంజిన్ యొక్క లోడ్ చక్రంతో జతచేయబడింది.
RPM అనుపాతంలో మారుతున్న పల్స్ రేటు లేదా ఫ్రీక్వెన్సీగా మార్చబడుతుంది మరియు IC1 యొక్క పిన్ # 2 ను టోగుల్ చేయడానికి BJT యొక్క బేస్ వద్ద వర్తించబడుతుంది.
సర్క్యూట్ ఆపరేషన్
IC1 ప్రాథమికంగా మోనోస్టేబుల్ మోడ్లో రిగ్డ్ చేయబడింది, దీని ఫలితంగా దాని అవుట్పుట్ అనులోమానుపాతంలో ఆన్ / ఆఫ్ స్విచ్చింగ్ను ఉత్పత్తి చేస్తుంది, దీని వ్యవధి చూపిన 1M పాట్ ఉపయోగించి సెట్ చేయబడుతుంది.
పొడిగించిన సమయ పప్పుల రూపంలో RPM కంటెంట్ను కలిగి ఉన్న IC1 నుండి అవుట్పుట్ రెసిస్టర్ 1K, 10K మరియు 22uF ఉపయోగించి రెండు RC భాగాలను కలిగి ఉన్న ఇంటిగ్రేటర్ దశ ద్వారా తగినంతగా సున్నితంగా ఉంటుంది. 2.2 యుఎఫ్ కెపాసిటర్లు.
ఈ దశ మోనోస్టేబుల్ యొక్క కఠినమైన RPM డేటాను సహేతుకంగా సజావుగా మారుతున్న లేదా ఘాటుగా మారుతున్న వోల్టేజ్గా మారుస్తుంది.
ఈ ఘాటుగా మారుతున్న వోల్టేజ్ తదుపరి IC2 555 దశ యొక్క పిన్ # 5 తో అనుసంధానించబడి ఉంటుంది.
ఈ అస్టేబుల్ యొక్క పని దాని సాధారణ ఆపరేటింగ్ పరిస్థితులలో దాని పిన్ # 3 వద్ద చాలా ఇరుకైన లేదా తక్కువ PWM అవుట్పుట్ను ఉత్పత్తి చేయడం.
ఇక్కడ సాధారణ ఆపరేటింగ్ కండిషన్ గ్రహించిన RPM పేర్కొన్న పరిమితిలో ఉన్నప్పుడు మరియు IC2 యొక్క పిన్ # 5 ఉద్గారిణి అనుచరుడి నుండి ఎటువంటి వోల్టేజ్ ఇన్పుట్ పొందనప్పుడు పరిస్థితిని సూచిస్తుంది. ఈ తక్కువ PWM అవుట్పుట్ రెండు 100k రెసిస్టర్లు మరియు IC2 పిన్ # 6/2 మరియు పిన్ # 7 తో అనుబంధించబడిన 1uF కెపాసిటర్ను సరిచేయడం ద్వారా అమలు చేయవచ్చు.
IC2 యొక్క పిన్ # 3 నుండి ఈ తక్కువ PWM TIP122 ను తగినంతగా మార్చలేకపోతుంది మరియు అందువల్ల సూచించిన మోటారు వీల్ అసెంబ్లీ అవసరమైన వేగాన్ని పొందలేకపోతుంది మరియు అందువల్ల నిష్క్రియం చేయబడుతుంది.
అయినప్పటికీ, RPM పెరగడం ప్రారంభించగానే టాకోమీటర్ విపరీతంగా అధిక వోల్టేజ్లను ఉత్పత్తి చేయడం ప్రారంభిస్తుంది, దీనివల్ల IC2 యొక్క పిన్ # 5 వద్ద దామాషా ప్రకారం పెరుగుతున్న వోల్టేజ్ ఏర్పడుతుంది.
ఇది తరువాత TIP122 ను కఠినంగా నిర్వహించడానికి అనుమతిస్తుంది, మరియు అనుసంధానించబడిన మోటారు తగినంత టార్క్ పొందటానికి వీలు కల్పిస్తుంది, తద్వారా ఇది అటాచ్డ్ యాక్సిలరేటర్ పెడల్ను క్షీణించే మోడ్ వైపు నొక్కడం ప్రారంభిస్తుంది.
ఈ విధానం డీజిల్ ఇంజిన్ను దాని వేగాన్ని తగ్గించమని బలవంతం చేస్తుంది, ఇది టాకోమీటర్ మరియు పిడబ్ల్యుఎం దశలను వాటి అసలు పరిస్థితులకు పునరుద్ధరించడానికి కారణమవుతుంది మరియు డీజిల్ మోటారుకు అవసరమైన నియంత్రిత వేగాన్ని అమలు చేస్తుంది.
చూపిన యాక్సిలరేటర్ మోటారు అమరికకు బదులుగా, TIP122 యొక్క కలెక్టర్ ప్రత్యామ్నాయంగా వైర్ చేయవచ్చు సిడిఐ యూనిట్ డీజిల్ ఇంజిన్ ఒకేలాంటి వేగం తగ్గింపు కోసం, ఘన స్థితిని సులభతరం చేయడానికి మరియు చర్చించిన ఎలక్ట్రానిక్ ఇంజిన్ స్పీడ్ కంట్రోల్ లేదా ఎలక్ట్రానిక్ ఇంజిన్ స్పీడ్ గవర్నర్ సర్క్యూట్ యొక్క మరింత నమ్మకమైన అమలు కోసం.
ఎలా సెటప్ చేయాలి
ప్రారంభంలో IC1 యొక్క పిన్ # 5 తో ఉద్గారిణి అనుచరుడి లింక్ను తొలగించడం ద్వారా IC1, IC2 దశలను డిస్కనెక్ట్ చేయండి.
తరువాత రెండు 100 కె రెసిస్టర్లు తగిన విధంగా మార్చబడి, సర్దుబాటు చేయబడిందని నిర్ధారించుకోండి, ఐసి 2 యొక్క పిన్ # 3 సాధ్యమైనంత ఇరుకైన PWM లను ఉత్పత్తి చేస్తుంది (time సుమారు 5% సమయం రేటు).
దీని తరువాత, a 0 నుండి 12V సర్దుబాటు విద్యుత్ సరఫరా , IC2 యొక్క పిన్ # 5 వద్ద మారుతున్న వోల్టేజ్ను వర్తించండి మరియు పిన్ # 3 వద్ద దామాషా ప్రకారం పెరుగుతున్న PWM ని నిర్ధారించండి.
అస్టేబుల్ విభాగాన్ని పరీక్షించిన తర్వాత, కావలసిన ఓవర్-లిమిట్ RPM కు అనుగుణమైన తెలిసిన RPM పప్పులను వర్తింపజేయడం ద్వారా దాని టాకోమీటర్ను తనిఖీ చేయాలి. సర్దుబాటు సమయంలో ఉద్గారిణి అనుచరుడు బిజెటి బేస్ ప్రీసెట్, దాని ఉద్గారిణి కనీసం 10 వి లేదా ఐసి 2 పిడబ్ల్యుఎమ్ అనుసంధానించబడిన పెడల్ కంట్రోల్ మోటారుపై అవసరమైన టార్క్ను ఉత్పత్తి చేయడానికి తగినంత స్థాయిని ఉత్పత్తి చేయగలదు.
మరికొన్ని ట్వీకింగ్ మరియు ప్రయోగాల తరువాత మీరు ఇంజిన్ మరియు దానితో అనుసంధానించబడిన లోడ్ కోసం అవసరమైన ఆటోమేటిక్ స్పీడ్ కంట్రోల్ సాధించవచ్చని ఆశిస్తారు.
UPDATE
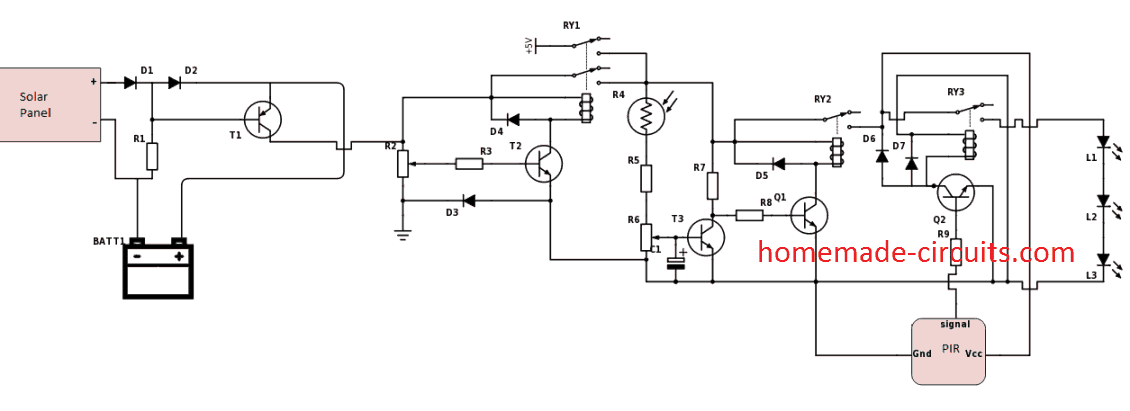
మోటారును స్ప్రింగ్ లోడెడ్ సోలేనోయిడ్తో భర్తీ చేస్తే, పైన పేర్కొన్న విధంగా క్రింద ఇచ్చిన విధంగా చాలా సరళీకృతం చేయవచ్చు:

ఉద్దేశించిన ఆటోమేటిక్ ఇంజిన్ స్పీడ్ రెగ్యులేషన్ను సాధించడానికి సోలేనోయిడ్ షాఫ్ట్ను యాక్సిలరేటర్ పెడల్తో కలుపుతారు.
ఫ్రీక్వెన్సీ టు వోల్టేజ్ కన్వర్టర్ గురించి మరిన్ని ఎంపికల కోసం, మీరు వీటిని చూడవచ్చు ఈ వ్యాసం .
మునుపటి: టైమర్ కంట్రోల్డ్ ఫిట్నెస్ జిమ్ అప్లికేషన్ సర్క్యూట్ తర్వాత: పిజో మాట్ సర్క్యూట్తో బ్యాటరీని ఛార్జింగ్ చేస్తుంది