ఈ ప్రాజెక్ట్లో, ఎలా చేయాలో చర్చించాము మోటారు వేగాన్ని నియంత్రించండి Arduino PWM సర్క్యూట్ ఉపయోగించి, మరియు రెండు పుష్ బటన్ స్విచ్ల ద్వారా Arduino ఉపయోగించి DC మోటారులో రివర్స్ ఫార్వర్డ్ లేదా దిశ నియంత్రణను ఎలా అమలు చేయాలి. ఈ సెటప్ ఉపయోగించి 30 ఆంపి వరకు అధిక కరెంట్ మోటారును నియంత్రించవచ్చు
ద్వారాఅంకిత్ నేగి
ఎలక్ట్రికల్ మరియు ఎలక్ట్రానిక్స్లో మోటారు చాలా ముఖ్యమైన భాగం, ఎందుకంటే వాటిని అనేక ప్రాంతాలలో యాక్యుయేటర్లుగా ఉపయోగిస్తారు.
రోబోటిక్స్ వంటి చిన్న అనువర్తనాలకు అలాగే భారీ మోటార్లు ఉపయోగించే ప్రాంతాలలో (పరిశ్రమలు మొదలైనవి) మాకు మోటార్లు అవసరం.
ఇప్పుడు చిన్న అనువర్తనాల కోసం ఉపయోగించే మోటార్లు ఎక్కువ కరెంట్ తీసుకోనందున వాటిని సులభంగా నియంత్రించవచ్చు (2amp కన్నా తక్కువ).
మరియు ఈ మోటార్లు ఆర్డునో వంటి మైక్రోకంట్రోలర్ను ఉపయోగించడం ద్వారా సులభంగా నియంత్రించవచ్చు మోటారు డ్రైవర్ ఐకాస్ L298 లేదా L293D వంటివి .
కానీ భారీ ప్రయోజనాల కోసం ఉపయోగించే మోటార్లు (10 పంపు కంటే ఎక్కువ) నియంత్రించబడవు ఈ ఐస్లను ఉపయోగించడం వారు పరిమిత కరెంట్ (గరిష్టంగా 2amp) ను సరఫరా చేయగలరు. కాబట్టి ఈ మోటార్లు ఎలా నియంత్రించబడతాయి?
సమాధానం సులభం: రిలేస్ ఉపయోగించి , ఇది స్విచ్లుగా పనిచేస్తుంది, అనగా చిన్న కరెంట్ ఉపయోగించి పెద్ద కరెంట్ను మార్చండి. ఈ విధంగా రెండు విషయాలు సాధించవచ్చు:
1. మా హై కరెంట్ మోటారును నడుపుతోంది.
2. సర్క్యూట్ను వేరుచేయడం, తద్వారా ఎటువంటి షాక్లను నివారించడం.
ఇప్పుడు ఈ రిలేను మార్చడానికి ఏదైనా మైక్రోకంట్రోలర్ ఉపయోగించవచ్చు. మేము ఇక్కడ arduino UNO ని ఉపయోగిస్తాము.
ఈ ప్రాజెక్టుకు అవసరమైన భాగాలు:
1. ARDUINO UNO: రిలే యొక్క ప్రాధమిక వైపుకు ఇన్పుట్ లాజిక్స్ ఇవ్వడం.
2. SPDT RELAY -2: రెండు దిశలలో భ్రమణానికి రెండు రిలేలు అవసరం. అధిక ప్రస్తుత మోటారు స్పెసిఫికేషన్లను నిర్వహించడానికి పరిచయాలను రేట్ చేయాలి

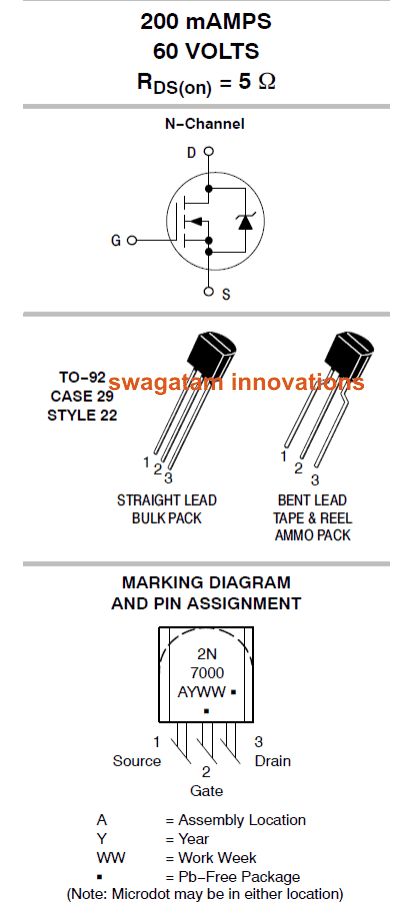
 3.పవర్ మోస్ఫెట్: మీరు ఐఆర్ఎఫ్ 1010 మోస్ఫెట్ను ఉపయోగించవచ్చు
3.పవర్ మోస్ఫెట్: మీరు ఐఆర్ఎఫ్ 1010 మోస్ఫెట్ను ఉపయోగించవచ్చు 
4. బ్యాటరీ (12 వి): మోటారుకు విద్యుత్తు సరఫరా చేయడానికి.
5. రెండు పుష్బటన్లు: ఆర్డునోకు ఇన్పుట్లను ఇవ్వడం (అనగా నొక్కినప్పుడు మరియు నొక్కినప్పుడు)

6. రెండు 10 కె రెసిస్టర్లు: డీబౌన్సింగ్ కోసం (క్రింద వివరించబడింది)

7. వైర్లను కనెక్ట్ చేయడం: కనెక్షన్లు చేయడానికి.
స్కీమాటిక్:

చిత్రంలో చూపిన విధంగా కనెక్షన్లు చేయండి.
1. సాధారణంగా రిలే రెండింటి యొక్క ఓపెన్ టెర్మినల్ను బ్యాటరీ యొక్క సానుకూల టెర్మినల్కు మరియు సాధారణంగా మూసివేసిన టెర్మినల్ను బ్యాటరీ యొక్క ప్రతికూల టెర్మినల్కు కనెక్ట్ చేయండి.
2. ప్రతి రిలే యొక్క మిగిలిన టెర్మినల్ (మూడింటిలో) మధ్య మోటారును కనెక్ట్ చేయండి.
3. రిలేస్ యొక్క ప్రాధమిక వైపు యొక్క ఒక టెర్మినల్ను కోడ్లో పేర్కొన్న విధంగా ఆర్డునో యొక్క అవుట్పుట్ పిన్లకు మరియు ఇతర టెర్మినల్ను భూమికి కనెక్ట్ చేయండి.
4. రెండు పుష్బటన్లలోని ఒక టెర్మినల్ను 5v పిన్ ఆర్డునోకు మరియు ఇతర టెర్మినల్ను కోడ్లో పేర్కొన్న విధంగా ఇన్పుట్ పిన్లకు కనెక్ట్ చేయండి.
4. ** ఈ సర్క్యూట్ యొక్క సరైన పనితీరుకు రెసిస్టర్లు చాలా ముఖ్యమైనవి కాబట్టి వాటిని క్రింద కనెక్ట్ చేయడం మర్చిపోవద్దు:
రెసిస్టర్లు ఎందుకు కనెక్ట్ చేయబడ్డారు?
ఆర్డునో యొక్క ఇన్పుట్ పిన్స్తో అనుసంధానించబడినది ఏదీ లేదని మీరు కనుగొనవచ్చు, కాని దీని అర్థం సూచించిన స్విచ్ తెరిచినప్పుడు ఈ పిన్అవుట్లు తార్కిక సున్నా కావచ్చు.
స్విచ్ ఓపెన్ అయినప్పుడు ఆర్డ్యునో లాజిక్ 0 మరియు లాజిక్ 1 ల మధ్య ఏదైనా యాదృచ్ఛిక విలువను తీసుకోగలదని ఇది సూచిస్తుంది, ఇది అస్సలు మంచిది కాదు (దీనిని బౌన్స్ అంటారు).
కాబట్టి మనకు ఇక్కడ కావలసింది ఏమిటంటే ఇన్పుట్ పిన్తో ఏమీ కనెక్ట్ కానప్పుడు, అంటే పుష్బటన్ ఓపెన్ అయినప్పుడు, ఆర్డునో పిన్ నుండి 0 ఇన్పుట్ తీసుకుంటుంది.
మరియు దీనిని సాధించడానికి, రెసిస్టర్ ద్వారా పుష్బటన్ ముందు పిన్ నేరుగా భూమికి అనుసంధానించబడి ఉంటుంది. ఇది రెసిస్టర్ లేకుండా నేరుగా భూమికి అనుసంధానించబడి ఉంటే, పిన్ భూమికి చిన్నదిగా ఉంటుంది మరియు భారీ మొత్తంలో కరెంట్ ప్రవహిస్తుంది కాబట్టి ఇది కాలిపోయే అవకాశాలు ఉన్నాయి. దీనిని నివారించడానికి, ఒక రెసిస్టర్ మధ్యలో అనుసంధానించబడి ఉంది.
ఈ రెసిస్టర్ను పుల్డౌన్ రెసిస్టర్ అని పిలుస్తారు, ఎందుకంటే ఇది పిన్పై తర్కాన్ని 0 కి లాగుతుంది. మరియు ఈ ప్రక్రియను డీబౌన్సింగ్ అంటారు.
కోడ్:
ఈ కోడ్ను మీ ఆర్డునోలో బర్న్ చేయండి.
int x// initialise variables
int y
int z
int w
void setup() {
pinMode(6,OUTPUT)//initialise pin 6 as output to RL1
pinMode(9,OUTPUT)//initialise pin 9 as output to RL2
pinMode(3,INPUT)//initialise pin 3 as input
pinMode(4,INPUT)//initialise pin 4 as input
pinMode(10,OUTPUT)//initialise PWM pin 8 as output to gate of mosfet
pinMode(A0,INPUT)//initialise pin A0 as input from pot.
Serial.begin(9600)
}
void loop() {
z=analogRead(A0)// read values from potentiometer in terms of voltage
w= map(z,0,1023,0,255)// map those values from 0 to 255
analogWrite(10,w)// write the mapped value to 10thpin as output
delay(1)//on time period of mosfet
analogWrite(10,w)
delay(1)//off time period of ,mosfet
Serial.println(z)//print value from pot to serial monitor
Serial.println(w)//print mapped value to serial monitor
x= digitalRead(3)
y= digitalRead(4)
if(x==0 && y==0){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)}
if(x==1 && y==0){digitalWrite(6,HIGH)// clockwise rotation of motor
digitalWrite(9,LOW)}
if(x==0 && y==1){digitalWrite(6,LOW)// anticlockwise rotation of motor
digitalWrite(9,HIGH)}
if(x==1 && y==1){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)
}
}
పని (అవగాహన కోడ్):
IR డైరెక్షన్ కంట్రోల్:
A. రెండు పుష్బటన్లు నొక్కినప్పుడు:
ఈ స్థితిలో, arduino రెండు పిన్స్ నుండి 0 ఇన్పుట్ తీసుకుంటుంది. ఈ స్థితిలో కోడ్లో పేర్కొన్న విధంగా అవుట్పుట్ పిన్లు రెండూ 0 లాజిక్ (తక్కువ) ఇస్తాయి:
if (x == 0 && y == 0) {DigitalWrite (6, LOW)
డిజిటల్ రైట్ (9, తక్కువ)}
రెండు రిలేల యొక్క ప్రాధమికానికి ఇన్పుట్ వోల్టేజ్ రెండింటి యొక్క సున్నా సెకండరీ టెర్మినల్ కాబట్టి సాధారణంగా మూసివేసిన స్థితిలో ఉంటుంది. అందువల్ల మోటారు యొక్క రెండు టెర్మినల్స్ వద్ద సున్నా వోల్ట్లు ఉన్నాయి, దీనివల్ల భ్రమణం ఉండదు.
బి. పుష్ బటన్ X నొక్కినప్పుడు కానీ Y నొక్కినప్పుడు:
ఈ స్థితిలో, ఆర్డునో పిన్ 4 నుండి 0 ఇన్పుట్లను తీసుకుంటుంది కాని పిన్ 3 నుండి ఇన్పుట్ 1 తీసుకుంటుంది. ఈ స్థితిలో కోడ్లో పేర్కొన్న విధంగా పిన్ 6 లాజిక్ 1 (హై) వద్ద ఉండాలి, అయితే పిన్ 9 లాజిక్ 0 (తక్కువ) వద్ద ఉండాలి:
if (x == 1 && y == 0) {DigitalWrite (6, HIGH)
డిజిటల్ రైట్ (9, తక్కువ)}
రిలే # 1 కు ఇన్పుట్ వోల్టేజ్ ఎక్కువగా ఉన్నందున, ఈ రిలే యొక్క స్విచ్ సాధారణంగా ఓపెన్ కండిషన్ కు విసిరివేయబడుతుంది, అయితే రిలే 2 కి ఇన్పుట్ వోల్టేజ్ తక్కువగా ఉంటుంది, ఈ రిలే యొక్క స్విచ్ సాధారణంగా మూసివేసిన స్థితిలో ఉంటుంది, దీనివల్ల మోటారు టెర్మినల్స్ అంతటా వరుసగా 12v మరియు 0v ఏర్పడతాయి. ఒక దిశలో మోటారు భ్రమణం.
C. పుష్ బటన్ Y నొక్కినప్పుడు కానీ X నొక్కినప్పుడు:
ఈ స్థితిలో, ఆర్డునో పిన్ 4 నుండి 1 ఇన్పుట్ తీసుకుంటుంది కాని పిన్ 3 నుండి ఇన్పుట్ 0 తీసుకుంటుంది. ఈ స్థితిలో కోడ్లో పేర్కొన్న విధంగా పిన్ 6 లాజిక్ 0 (తక్కువ) వద్ద ఉండాలి, అయితే పిన్ 9 లాజిక్ 1 (హై) వద్ద ఉండాలి:
if (x == 1 && y == 0) {DigitalWrite (6, LOW)
డిజిటల్ రైట్ (9, హై)}
రిలే # 2 కు ఇన్పుట్ వోల్టేజ్ ఈసారి ఎక్కువగా ఉన్నందున, ఈ రిలే యొక్క స్విచ్ సాధారణంగా ఓపెన్ కండిషన్ కు విసిరివేయబడుతుంది, అయితే రిలే # 1 కు ఇన్పుట్ వోల్టేజ్ తక్కువగా ఉంటుంది, ఈ రిలే యొక్క స్విచ్ సాధారణంగా మూసివేసిన స్థితిలో ఉంటుంది, దీనివల్ల మోటారు అంతటా వరుసగా 12v మరియు 0v వస్తుంది. టెర్మినల్స్, మరొక దిశలో మోటారు భ్రమణానికి కారణమవుతాయి.
D. రెండు పుష్బటన్లు నొక్కినప్పుడు:
ఈ స్థితిలో, arduino రెండు పిన్స్ నుండి 1 ఇన్పుట్ తీసుకుంటుంది. ఈ స్థితిలో కోడ్లో పేర్కొన్న విధంగా అవుట్పుట్ పిన్లు రెండూ 0 లాజిక్ (తక్కువ) ఇస్తాయి:
if (x == 0 && y == 0) {DigitalWrite (6, LOW)
డిజిటల్ రైట్ (9, తక్కువ)}
రెండు రిలేల యొక్క ప్రాధమికానికి ఇన్పుట్ వోల్టేజ్ రెండింటి యొక్క సున్నా సెకండరీ టెర్మినల్ కాబట్టి సాధారణంగా మూసివేసిన స్థితిలో ఉంటుంది. అందువల్ల మోటారు యొక్క రెండు టెర్మినల్స్ వద్ద సున్నా వోల్ట్ ఉంటుంది, దీనివల్ల భ్రమణం ఉండదు.
• వేగ నియంత్రణ:
ఆర్డునో యొక్క A0 పిన్కు 0 వోల్ట్లను ఇన్పుట్గా ఇచ్చినప్పుడు పొటెన్షియోమీటర్ అటువంటి స్థితిలో ఉందని చెప్పండి. ఈ కారణంగా, ఆర్డునో ఈ విలువను 0 గా మ్యాప్ చేస్తుంది మరియు తద్వారా పిన్ # 10 పై 0 అవుట్పుట్ PWM గా ఇస్తుంది, అనగా,
అనలాగ్రైట్ (10,0) // మ్యాప్ చేసిన విలువను 10 వ పిన్కు అవుట్పుట్గా రాయండి
అందువల్ల మోస్ఫెట్ యొక్క గేట్ 0 కరెంట్ పొందుతుంది, దీని వలన అది ఆపివేయబడుతుంది మరియు మోటారు స్విచ్ ఆఫ్ స్థితిలో ఉంటుంది.
ఏదేమైనా, కుండ తిప్పబడినప్పుడు మరియు కుండ విలువ వైవిధ్యంగా ఉన్నందున, పిన్ A0 పై వోల్టేజ్ కూడా మారుతూ ఉంటుంది, మరియు ఈ విలువ పిన్ # 10 లో అనులోమానుపాతంలో పెరుగుతున్న PWM వెడల్పుతో మ్యాప్ చేయబడుతుంది, దీనివల్ల మోటారు మరియు మోస్ఫెట్ ద్వారా ఎక్కువ విద్యుత్తు ప్రవహిస్తుంది కాలువ, ఇది మోటారును ఎక్కువ వేగాన్ని అనులోమానుపాతంలో పొందటానికి అనుమతిస్తుంది, మరియు అదే విధంగా జరుగుతుంది.
అందువల్ల పైన పేర్కొన్న చర్చ నుండి, అధిక కరెంట్ DC మోటారు యొక్క వేగాన్ని మరియు దిశను (రివర్స్ ఫార్వర్డ్) నియంత్రించడానికి ఒక ఆర్డునోను ఎలా ఉపయోగించవచ్చో చూడవచ్చు, పేర్కొన్న కుండను సర్దుబాటు చేయడం ద్వారా మరియు కొన్ని పుష్ బటన్ల ద్వారా.
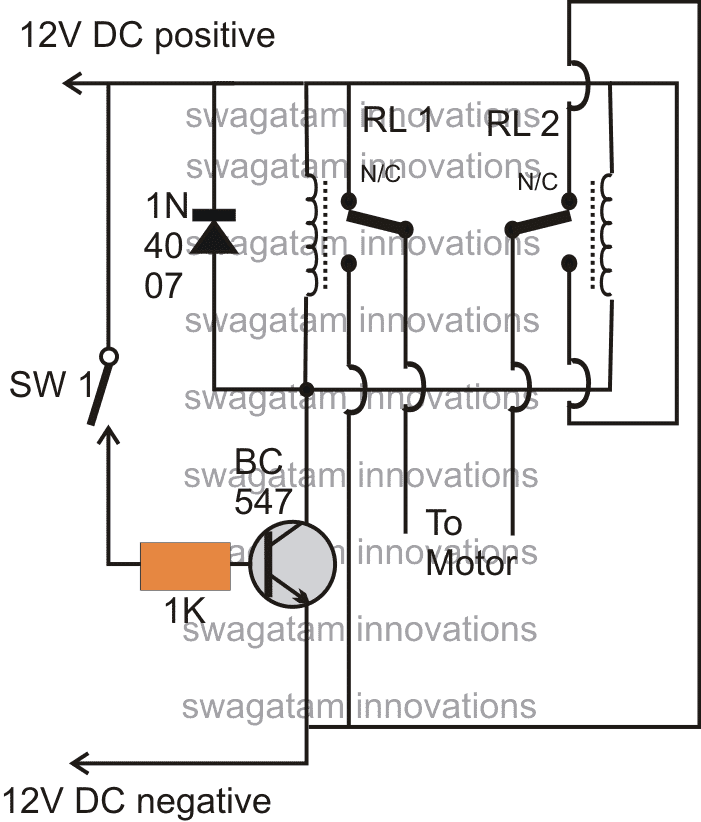
నవీకరణ : అధిక ప్రస్తుత మోటారు కోసం, దయచేసి ఈ క్రింది మార్పు చేసిన రేఖాచిత్రంలో సూచించిన విధంగా ఈ అధిక శక్తి రిలేలను నిర్వహించడానికి 12V / 30 amp రిలేలు మరియు BJT డ్రైవర్ దశలను ఉపయోగించండి:

మునుపటి: అలారంతో కార్ రివర్స్ పార్కింగ్ సెన్సార్ సర్క్యూట్ తర్వాత: ఆర్డునో పిడబ్ల్యుఎం సిగ్నల్ జనరేటర్ సర్క్యూట్