ఈ బహుముఖ బ్రష్లెస్ (బిఎల్డిసి) మోటారు కంట్రోలర్ ఐసి ఏదైనా కావలసిన అధిక వోల్టేజ్, హై కరెంట్, హాల్ ఎఫెక్ట్ సెన్సార్ను 3-ఫేజ్ బిఎల్డిసి మోటారును తీవ్ర ఖచ్చితత్వం మరియు భద్రతతో నియంత్రించడానికి కలిగి ఉంది. వివరాలను లోతుగా తెలుసుకుందాం.

IC MC33035 ఉపయోగించి
సర్క్యూట్ యొక్క 'హీరో' సింగిల్ చిప్ కంట్రోలర్ MC33035, ఇది అధిక పనితీరు గల రెండవ తరం ఐసి మాడ్యూల్, ఇది చాలా ఎక్కువ కరెంట్, హై వోల్టేజ్, 3-ఫేజ్ లేదా 4-ఫేజ్ బిఎల్డిసిని అమలు చేయడానికి అవసరమైన అన్ని క్రియాశీల విధులను కలిగి ఉంటుంది. ఓపెన్ లూప్ లేదా క్లోజ్డ్ లూప్ కాన్ఫిగరేషన్ ఉన్న మోటార్లు.

ఖచ్చితమైన కమ్యుటేషన్ సీక్వెన్సింగ్, సరైన సెన్సార్ వోల్టేజ్ను సులభతరం చేయడానికి ఉష్ణోగ్రత పరిహార సూచన, ప్రోగ్రామబుల్ ఫ్రీక్వెన్సీ సాటూత్ ఓసిలేటర్, మూడు అంతర్నిర్మిత ఓపెన్ కలెక్టర్ హై-సైడ్ డ్రైవర్ దశలు మరియు మూడు హై కరెంట్ టోటెమ్-పోల్ను ప్రారంభించడానికి ఐసి రోటర్ పొజిషన్ డీకోడర్ను కలిగి ఉంది. తక్కువ-వైపు డ్రైవర్లను టైప్ చేయండి, ప్రత్యేకంగా 3-దశల హెచ్-బ్రిడ్జ్ హై పవర్ మోస్ఫెట్ మోటార్ కంట్రోలర్ దశను ఆపరేట్ చేయడానికి రూపొందించబడింది.
చిప్ అంతర్గతంగా హై ఎండ్ ప్రొటెక్షన్ లక్షణాలతో బలంగా ఉంది, మరియు అండర్-వోల్టేజ్ లాకౌట్, సర్దుబాటు-ఆలస్యం లాచ్డ్ షట్డౌన్, అంతర్గత ఐసి అధిక ఉష్ణోగ్రత మూసివేయడం మరియు ప్రత్యేకంగా రూపొందించబడిన ఎంపిక ద్వారా సైకిల్-బై-సైకిల్ కరెంట్ పరిమితి వంటి ఫూల్ప్రూఫ్ నియంత్రణ దశలు తప్పు అవుట్పుట్ పిన్అవుట్, ఇది ఇష్టపడే అధునాతన ప్రాసెసింగ్ మరియు ఫీడ్ బ్యాక్ల కోసం MCU తో అనుసంధానించబడి ఉండవచ్చు.
ఈ ఐసితో అమలు చేయగల విలక్షణమైన విధులు, ఓపెన్ లూప్ స్పీడ్ కంట్రోల్, ఫార్వర్డ్ రివర్స్ డైరెక్షన్ కంట్రోల్, 'రన్ ఎనేబుల్', అత్యవసర డైనమిక్ బ్రేక్ ఫీచర్.
60 నుండి 300 డిగ్రీలు లేదా 120 నుండి 240 డిగ్రీల దశలను కలిగి ఉన్న మోటారు సెన్సార్లతో పనిచేయడానికి IC రూపొందించబడింది, సాంప్రదాయ బ్రష్ చేసిన మోటారులను నియంత్రించడానికి కూడా IC ఉపయోగించగలదు.
ఐసి ఎలా పనిచేస్తుంది
MC33035 సృష్టించిన అనేక అధిక సామర్థ్య మోనోలిథిక్ DC బ్రష్ లెస్ మోటార్ కంట్రోలర్లలో ఒకటి మోటరోలా .
ఇది పూర్తి-ఫీచర్, ఓపెన్ లూప్, మూడు లేదా నాలుగు దశల మోటారు నియంత్రణ వ్యవస్థను ప్రేరేపించడానికి అవసరమైన సామర్థ్యాల గురించి రూపొందించబడింది.
ఇంకా, DC బ్రష్ మోటార్లు నియంత్రించడానికి నియంత్రికను సాధించవచ్చు. బైపోలార్ అనలాగ్ టెక్నాలజీతో రూపొందించబడిన ఇది క్రూరమైన పారిశ్రామిక పరిసరాలలో సమర్థత మరియు మన్నిక యొక్క ఉన్నత స్థాయిని కలిగి ఉంది.
MC33035 ఖచ్చితమైన కమ్యుటేషన్ సీక్వెన్సింగ్ కోసం రోటర్ పొజిషన్ డీకోడర్ను కలిగి ఉంది, పర్యావరణం సెన్సార్ శక్తిని అందించడంలో సమర్థవంతమైన రిఫరెన్స్ సామర్థ్యం, ఫ్రీక్వెన్సీ ప్రోగ్రామబుల్ సాటూత్ ఓసిలేటర్, పూర్తిగా ప్రాప్యత చేయగల లోపం యాంప్లిఫైయర్, పల్స్ వెడల్పు మాడ్యులేటర్ కంపారిటర్, 3 ఓపెన్ కలెక్టర్ టాప్ డ్రైవ్ అవుట్పుట్లు మరియు 3 అధిక ప్రస్తుత టోటెమ్ పోల్ తక్కువ డ్రైవర్ అవుట్పుట్లు ఆపరేటింగ్ పవర్ MOSFET లకు సరైనవి.
MC33035 లో నిర్మించిన షీల్డింగ్ సామర్ధ్యాలు, వీటిలో అండర్ వోల్టేజ్ లాకౌట్, సైకిల్ - బై - సైకిల్ కరెంట్ పరిమితి ఎంచుకోదగిన సమయం ఆలస్యం లాచెడ్ షట్డౌన్ మోడ్, అంతర్నిర్మిత థర్మల్ షట్డౌన్, మైక్రోప్రాసెసర్ కంట్రోలర్కు సౌకర్యవంతంగా ఇంటర్ఫేస్ చేయబడే ప్రత్యేకమైన తప్పు అవుట్పుట్తో పాటు.
ప్రామాణిక మోటారు నియంత్రణ లక్షణాలు ఓపెన్ లూప్ స్పీడ్ కంట్రోల్, ఫార్వర్డ్ లేదా రివర్స్ రొటేషన్, రన్ ఎనేబుల్ మరియు డైనమిక్ బ్రేకింగ్ను కలిగి ఉంటాయి. ఆ పైన, MC33035 లో 60 ° / 120 ° సెలెక్ట్ పిన్ ఉంది, ఇది 60 ° లేదా 120 ° సెన్సార్ ఎలక్ట్రికల్ ఫేజింగ్ ఇన్పుట్ల కోసం రోటర్ పరిస్థితి డీకోడర్ను కాన్ఫిగర్ చేస్తుంది.

పిన్ అవుట్ విధులు:
పిన్ 1, 2, 24 (బిటి, ఎట్, సిటి) = ఇవి BJT లు వంటి బాహ్యంగా కాన్ఫిగర్ చేయబడిన విద్యుత్ పరికరాలను ఆపరేట్ చేయడానికి పేర్కొన్న IC యొక్క మూడు ఎగువ డ్రైవ్ అవుట్పుట్లు. ఈ పిన్అవుట్లు అంతర్గతంగా ఓపెన్ కలెక్టర్ మోడ్గా కాన్ఫిగర్ చేయబడ్డాయి.
పిన్ # 3 (Fwd, Rev) = ఈ పిన్అవుట్ మోటారు భ్రమణ దిశను నియంత్రించడానికి ఉపయోగించబడుతుంది.
పిన్ # 4, 5, 6 (Sa, Sb, Sc) = ఇవి మోటారు యొక్క నియంత్రణ క్రమాన్ని ఆదేశించడానికి కేటాయించిన IC యొక్క 3 సెన్సార్ అవుట్పుట్లు.
పిన్ # 7 (అవుట్పుట్ ఎనేబుల్) = ఇక్కడ అధిక తర్కం నిర్వహించబడుతున్నంతవరకు మోటారు ఆపరేషన్ను ప్రారంభించడానికి IC యొక్క ఈ పిన్ కేటాయించబడుతుంది, అయితే తక్కువ తర్కం మోటారు తీరాన్ని ప్రారంభించడానికి.
పిన్ # 8 (రిఫరెన్స్ అవుట్పుట్) = ఈ పిన్ ఓసిలేటర్ టైమింగ్ కెపాసిటర్ సిటిని ఛార్జ్ చేయడానికి సరఫరా కరెంట్తో ప్రారంభించబడుతుంది మరియు లోపం యాంప్లిఫైయర్ కోసం రిఫరెన్స్ స్థాయిని అందిస్తుంది. మోటారు హాల్ ఎఫెక్ట్ సెన్సార్ ఐసిలకు సరఫరా శక్తిని అందించడానికి కూడా దీనిని ఉపయోగించవచ్చు.
పిన్ # 9 (ప్రస్తుత సెన్స్ నాన్-ఇన్వర్టింగ్ ఇన్పుట్) : పిన్ # 15 కు సూచనగా 100mV యొక్క సిగ్నల్ అవుట్పుట్ ఈ పిన్అవుట్ నుండి సాధించవచ్చు మరియు పేర్కొన్న ఓసిలేటర్ చక్రంలో అవుట్పుట్ స్విచ్ ప్రసరణను రద్దు చేయడానికి ఉపయోగించబడుతుంది. ఈ పిన్అవుట్ సాధారణంగా ప్రస్తుత సెన్సింగ్ రెసిస్టర్ పైభాగంలో కలుపుతుంది.
పిన్ # 10 (ఓసిలేటర్) : ఈ పిన్అవుట్ RC నెట్వర్క్ Rt, మరియు Ct సహాయంతో IC కొరకు ఓసిలేటర్ ఫ్రీక్వెన్సీని నిర్ణయిస్తుంది.
పిన్ # 11 (లోపం ఆంప్-ఇన్వర్టింగ్ ఇన్పుట్) : ఈ పిన్అవుట్ స్పీడ్ కంట్రోల్ పొటెన్షియోమీటర్తో ఉపయోగించబడుతుంది.
పిన్ # 12 (ఇన్పుట్ ఇన్వర్ట్ చేయడంలో లోపం) : ఓపెన్ లూప్ అనువర్తనాలను ప్రారంభించడానికి పైన పేర్కొన్న లోపం amp అవుట్పుట్తో ఈ పిన్ అంతర్గతంగా కట్టిపడేశాయి .
పిన్ # 13 (లోపం amp అవుట్పుట్ / PWM ఇన్పుట్) : క్లోజ్డ్ లూప్ అనువర్తనాల సమయంలో పరిహారం అందించడం ఈ పిన్అవుట్ యొక్క పని.
పిన్ # 14 (తప్పు అవుట్పుట్) : ఈ తప్పు సూచిక అవుట్పుట్ కొన్ని క్లిష్టమైన పరిస్థితులలో చురుకైన లాజిక్ తక్కువగా మారవచ్చు: సెన్సార్ కోసం చెల్లని ఇన్పుట్ కోడ్, సున్నా లాజిక్తో పిన్అవుట్ ఫీడ్ను ప్రారంభించండి, ప్రస్తుత సెన్స్ ఇన్పుట్ పిన్అవుట్ 100mV కన్నా ఎక్కువ (పిన్ 15 సూచనతో 9 పిన్ 9) , అండర్ వోల్టేజ్ లాకౌట్ యొక్క ట్రిగ్గర్ లేదా థర్మల్ షట్డౌన్ పరిస్థితి).
పిన్ # 15 (ప్రస్తుత సెన్స్ ఇన్వర్టింగ్ ఇన్పుట్) : ఈ పిన్ అంతర్గత 100 ఎంవి థ్రెషోల్డ్ కోసం రిఫరెన్స్ స్థాయిని అందించడానికి సెట్ చేయబడింది మరియు దిగువ వైపు కరెంట్ సెన్స్ రెసిస్టర్తో అనుసంధానించబడి ఉండవచ్చు.
పిన్ # 16 (GND) : ఇది ఐసి యొక్క గ్రౌండ్ పిన్ మరియు కంట్రోల్ సర్క్యూట్కు గ్రౌండ్ సిగ్నల్ అందించడానికి నియమించబడినది మరియు విద్యుత్ వనరుల మైదానానికి తిరిగి సూచించాల్సిన అవసరం ఉంది.
పిన్ # 17: (విసిసి) : ఇది IC యొక్క కంట్రోల్ సర్క్యూట్కు సానుకూల వోల్టేజ్ను అందించడానికి పేర్కొన్న సరఫరా పాజిటివ్ పిన్. ఈ పిన్ యొక్క కనీస పరిధి 10V మరియు గరిష్టంగా 30V వద్ద ఉంటుంది.
పిన్ # 18 (విసి) : ఈ పిన్అవుట్ ఈ పిన్కు ఆపాదించబడిన శక్తి ద్వారా తక్కువ డ్రైవ్ అవుట్పుట్ల కోసం హై స్టేట్ (వోహ్) ను సెట్ చేస్తుంది. దశ 10 నుండి 30 వి పరిధితో పనిచేస్తుంది.
పిన్ # 19, 20, 21 (సిబి, బిబి, అబ్) : ఈ మూడు పిన్అవుట్లు అంతర్గతంగా టోటెమ్ పోల్ అవుట్పుట్ల రూపంలో అమర్చబడి ఉంటాయి మరియు తక్కువ డ్రైవ్ అవుట్పుట్ శక్తి పరికరాలను నడపడానికి కేటాయించబడతాయి.
పిన్ # 22 (60 డి, 120 డి ఫేజ్ షిఫ్ట్ సెలెక్ట్) : ఈ పిన్అవుట్కు ఆపాదించబడిన స్థితి 60 డిగ్రీల (హై లాజిక్) లేదా 120 డిగ్రీల (తక్కువ లాజిక్) ఫేజ్ యాంగిల్ ఇన్పుట్ల కోసం హాల్ ఎఫెక్ట్ సెన్సార్లతో కంట్రోల్ సర్క్యూట్ ఆపరేషన్ను కాన్ఫిగర్ చేస్తుంది.
పిన్ # 23 (బ్రేక్) : ఈ పిన్అవుట్ వద్ద తక్కువ లాజిక్ BLDC మోటారును సజావుగా నడపడానికి అనుమతిస్తుంది, అయితే లాజిక్ హై వేగంగా మోటారు ఆపరేషన్ను వేగంగా క్షీణించడం ద్వారా ఆపివేస్తుంది.
ఫంక్షనల్ వివరణ
పై చిత్రంలో ప్రతినిధి అంతర్గత బ్లాక్ రేఖాచిత్రం ప్రదర్శించబడుతుంది. క్రింద పేర్కొన్న ప్రతి సెంట్రల్ బ్లాక్స్ యొక్క ప్రయోజనాలు మరియు పని యొక్క ఉపన్యాసం.
రోటర్ స్థానం డీకోడర్
ఎగువ మరియు దిగువ డ్రైవ్ పిన్అవుట్ల యొక్క సరైన క్రమాన్ని అందించడానికి లోపలి రోటర్ స్థానం డీకోడర్ 3 సెన్సార్ ఇన్పుట్లను (పిన్స్ 4, 5, 6) మీటర్ చేస్తుంది. సెన్సార్ ఇన్పుట్లను ఓపెన్ కలెక్టర్ రకం హాల్ ఎఫెక్ట్ స్విచ్లు లేదా ఆప్టో స్లాటెడ్ కప్లర్లతో నేరుగా ఇంటర్ఫేస్ చేయడానికి తయారు చేస్తారు.
అంతర్నిర్మిత పుల్-అప్ రెసిస్టర్లు అవసరమైన బాహ్య భాగాలను తగ్గించడానికి వర్గీకరించబడ్డాయి. ఇన్పుట్లు TTL అనుకూలంగా ఉంటాయి, వాటి పరిమితులు 2.2 V వద్ద ఉంటాయి.
MC33035 శ్రేణి IC లు 3 దశల మోటారులను నియంత్రించడానికి మరియు సెన్సార్ దశల యొక్క అత్యంత ప్రాచుర్యం పొందిన 4 సమావేశాలతో అమలు చేయడానికి ఉద్దేశించబడ్డాయి. 60 ° / 120 ° సెలెక్ట్ (పిన్ 22) త్వరితంగా సరఫరా చేయబడుతుంది మరియు 60 °, 120 °, 240 ° లేదా 300 ° ఎలక్ట్రికల్ సెన్సార్ దశలను కలిగి ఉన్న మోటారులను నియంత్రించడానికి MC33035 ను సొంతంగా కాన్ఫిగర్ చేస్తుంది.
3 సెన్సార్ ఇన్పుట్లతో మీరు 8 సంభావ్య ఇన్పుట్ కోడ్ నిర్మాణాలను కనుగొంటారు, వాటిలో 6 చట్టబద్ధమైన రోటర్ ప్లేస్మెంట్లు.
ఇతర రెండు సంకేతాలు పాతవి, ఎందుకంటే అవి సాధారణంగా ఓపెన్ లేదా షార్ట్ సెన్సార్ కనెక్షన్ ఫలితంగా ఉంటాయి.
6 సమర్థించదగిన ఇన్పుట్ కోడ్లతో, డీకోడర్ మోటారు రోటర్ స్థానాన్ని 60 ఎలక్ట్రికల్ డిగ్రీల స్పెక్ట్రం లోపల చూసుకోవచ్చు.
ఫార్వర్డ్ / రివర్స్ ఇన్పుట్ (పిన్ 3) స్టేటర్ వైండింగ్ అంతటా వోల్టేజ్ను రివర్స్ చేయడం ద్వారా మోటారు షెడ్యూల్ యొక్క కోర్సును సవరించడానికి ఒక సాధనంగా ఉపయోగించబడుతుంది.
కేటాయించిన సెన్సార్ ఇన్పుట్ ప్రోగ్రామ్ కోడ్ను ఉపయోగించి ఇన్పుట్ స్థితిని మార్చిన వెంటనే (ఉదాహరణకు 100), అదే ఆల్ఫా స్థితిని ఉపయోగించి సులభతరం చేయబడిన టాప్ మరియు బేస్ డ్రైవ్ అవుట్పుట్లు మార్చుకోబడతాయి (AT నుండి AB, BT నుండి BB, CT నుండి CB).
ముఖ్యంగా, మార్చగల స్ట్రింగ్ దిశ మార్చబడుతుంది మరియు మోటారు డైరెక్షనల్ క్రమాన్ని తిప్పికొడుతుంది. మోటారు ఆన్ / ఆఫ్ నియంత్రణ అవుట్పుట్ ఎనేబుల్ (పిన్ 7) ద్వారా సాధించబడుతుంది.
డిస్కనెక్ట్ చేయబడినప్పుడు, అంతర్గత 25 μA ప్రస్తుత సరఫరా ప్రముఖ మరియు బేస్ డ్రైవ్ అవుట్పుట్ల క్రమాన్ని అనుమతిస్తుంది. గ్రౌండింగ్ చేసినప్పుడు, టాప్ పార్ట్ డ్రైవ్ అవుట్పుట్లు స్విచ్ ఆఫ్ అవుతాయి మరియు బేస్ డ్రైవ్లు తక్కువ స్థాయికి నెట్టబడతాయి, మోటారును తీరానికి మరియు ఫాల్ట్ అవుట్పుట్ను ట్రిగ్గర్ చేస్తుంది.
డైనమిక్ మోటారు బ్రేకింగ్ అంతిమ పరికరంలో రక్షణ యొక్క మిగులు మార్జిన్ను అభివృద్ధి చేయడం సాధ్యపడుతుంది. మీ బ్రేక్ ఇన్పుట్ (పిన్ 23) ను ఉన్నత స్థితిలో ఉంచడం ద్వారా బ్రేకింగ్ సిస్టమ్ సాధించబడుతుంది.
ఇది స్విచ్ ఆఫ్ చేయడానికి టాప్ డ్రైవ్ అవుట్పుట్లకు మరియు అండర్ సైడ్ డ్రైవ్లను యాక్టివేట్ చేయడానికి దారితీస్తుంది, మోటారును తగ్గిస్తుంది again మళ్ళీ ఉత్పత్తి అవుతుంది EMF. బ్రేక్ ఇన్పుట్ అన్ని ఇతర ఇన్పుట్లపై సంపూర్ణ, హృదయపూర్వక పరిశీలనను కలిగి ఉంటుంది. లోపలి 40 kΩ పుల్-అప్ రెసిస్టర్ స్ట్రీమ్లైన్స్ ఇంటర్ఫేసింగ్ ప్రోగ్రామ్ సేఫ్టీ - స్విచ్ ఉపయోగించి బ్రేక్ యాక్టివేషన్కు హామీ ఇవ్వడం ద్వారా తెరవబడి లేదా మూసివేయబడుతుంది.
మార్పిడి లాజిక్ ట్రూత్ టేబుల్ క్రింద చూపబడింది. బ్రేక్ ఇన్పుట్ మరియు 3 టాప్ డ్రైవ్ అవుట్పుట్ BJT లకు ఇన్పుట్లను పరిశీలించడానికి 4 ఇన్పుట్ NOR గేట్ ఉపయోగించబడుతుంది.

టాప్ డ్రైవ్ అవుట్పుట్లు అధిక స్థితిని సాధించడానికి ముందు బ్రేకింగ్ను ఆపివేయడం సాధారణంగా లక్ష్యం. ఎగువ మరియు బేస్ పవర్ స్విచ్ల సమకాలీకరించిన లీజింగ్ను నివారించడానికి ఇది మిమ్మల్ని అనుమతిస్తుంది.
సగం వేవ్ మోటారు డ్రైవ్ ప్రోగ్రామ్లలో, టాప్ డ్రైవ్ భాగాలు సాధారణంగా అవసరం లేదు మరియు అవి చాలా సందర్భాలలో వేరు చేయబడతాయి. ఈ రకమైన పరిస్థితులతో బ్రేకింగ్ ఇంకా సాధించబోతోంది ఎందుకంటే టాప్ డ్రైవ్ అవుట్పుట్ BJT లకు బేస్ వోల్టేజ్ను NOR గేట్ కనుగొంటుంది.
లోపం-యాంప్లిఫైయర్
క్లోజ్డ్-లూప్-మోటార్ స్పీడ్ కంట్రోల్ అమలులో సహాయపడటానికి ప్రతి ఇన్పుట్లు మరియు అవుట్పుట్లకు (పిన్స్ # 11, 12, 13) క్రియాశీల ప్రాప్యతతో మెరుగైన సామర్థ్యం, పూర్తిగా పరిహారం పొందిన లోపం యాంప్లిఫైయర్ అందించబడుతుంది.
యాంప్లిఫైయర్ 80 డిబి యొక్క ప్రామాణిక డిసి వోల్టేజ్ లాభం, 0.6 మెగాహెర్ట్జ్ లాభం బ్యాండ్విడ్త్తో పాటు విస్తృత ఇన్పుట్ కామన్ మోడ్ వోల్టేజ్ పరిధితో పాటు భూమి నుండి వ్రెఫ్ వరకు విస్తరించి ఉంటుంది.
ఓపెన్ లూప్ స్పీడ్ కంట్రోల్ ప్రోగ్రామ్లలో, యాంప్లిఫైయర్ ఐక్యత లాభం వోల్టేజ్ అనుచరుడిగా నాన్ఇన్వర్టింగ్ ఇన్పుట్తో పాటు స్పీడ్ సెట్ వోల్టేజ్ సరఫరాతో ఏర్పాటు చేయబడింది.
ఓసిలేటర్ RT మరియు CT సమయ మూలకాల కోసం నిర్ణయించిన విలువల ద్వారా లోపలి రాంప్ ఓసిలేటర్ యొక్క ఫ్రీక్వెన్సీ హార్డ్ వైర్డు.
కెపాసిటర్ CT ని రెసిస్టర్ RT ద్వారా రిఫరెన్స్ అవుట్పుట్ (పిన్ 8) ద్వారా వసూలు చేస్తారు మరియు లోపలి ఉత్సర్గ ట్రాన్సిస్టర్ ద్వారా విడుదల చేస్తారు.
రాంప్ పీక్ మరియు పిట్ వోల్టేజీలు సాధారణంగా 4.1 V మరియు 1.5 V గా ఉంటాయి. వినగల శబ్దం మరియు అవుట్పుట్ మార్పిడి పనితీరు మధ్య మంచి స్కింప్ను అందించడానికి, 20 నుండి 30 kHz ఎంపికలో ఓసిలేటర్ ఫ్రీక్వెన్సీ సూచించబడింది. భాగం ఎంపిక కోసం మూర్తి 1 కు సూచన చేయండి.
పల్స్ వెడల్పు మాడ్యులేటర్
ఇంటిగ్రేటెడ్ పల్స్-వెడల్పు-మాడ్యులేషన్ కమ్యుటేషన్ సిరీస్ అంతటా ప్రతి స్టేటర్ వైండింగ్కు సూచించిన ప్రామాణిక వోల్టేజ్ను మార్చడం ద్వారా మోటారు వేగాన్ని నియంత్రించడానికి శక్తి ప్రభావవంతమైన విధానాన్ని అందిస్తుంది.
CT డిశ్చార్జ్ చేస్తున్నప్పుడు, ఓసిలేటర్ ప్రతి లాచెస్ను మోడల్ చేస్తుంది, ఇది అప్పర్ మరియు తక్కువ డ్రైవ్ అవుట్పుట్ల ప్రసరణను అనుమతిస్తుంది. PWM కంపారిటర్ టాప్ గొళ్ళెంను రీసెట్ చేస్తుంది, CT యొక్క పాజిటివ్ - గోయింగ్ రాంప్ లోపం యాంప్లిఫైయర్ ఫలితానికి మించి మారిన తర్వాత తక్కువ డ్రైవ్ అవుట్పుట్ లీజింగ్ను ముగించింది.
పల్స్-వెడల్పు-మాడ్యులేటర్ టైమింగ్ రేఖాచిత్రం మూర్తి 21 లో ప్రదర్శించబడింది.
స్పీడ్ మేనేజ్మెంట్ కోసం పల్స్ వెడల్పు మాడ్యులేషన్ తక్కువ డ్రైవ్ అవుట్పుట్ల వద్ద ప్రత్యేకంగా ఉంటుంది. ప్రస్తుత పరిమితి మోటారు యొక్క స్థిరమైన పనితీరు - లోడెడ్ కంటే ఎక్కువగా ఉండవచ్చు, ఇది వేడెక్కడం మరియు అనివార్యమైన పనిచేయకపోవటానికి దారితీస్తుంది.
ఈ హానికరమైన పరిస్థితిని చక్రం - బై - చక్రం ప్రస్తుత పరిమితితో సులభంగా నివారించవచ్చు.
అంటే, ప్రతి - చక్రంలో ఒక స్వతంత్ర విధిగా వ్యవహరించబడుతుంది. అవుట్పుట్ స్విచ్ ట్రిగ్గర్ చేసిన ప్రతిసారీ స్టేటర్ కరెంట్ బిల్డ్ up ను ట్రాక్ చేయడం ద్వారా సైకిల్ - బై - సైకిల్ కరెంట్ పరిమితి సాధించబడుతుంది మరియు అధిక ప్రస్తుత పరిస్థితిని గ్రహించిన తరువాత, తక్షణమే స్విచ్ను నిలిపివేసి, ఓసిలేటర్ రాంప్-అప్ విరామం యొక్క అత్యుత్తమ కాలానికి దాన్ని నిలిపివేస్తుంది.
3 దిగువ భాగం స్విచ్ ట్రాన్సిస్టర్లకు (క్యూ 4, క్యూ 5, క్యూ 6) అనుగుణంగా గ్రౌండ్ - రిఫరెన్స్డ్ సెన్సింగ్ రెసిస్టర్ ఆర్ఎస్ (మూర్తి 36) ను వర్తింపజేయడం ద్వారా స్టేటర్ కరెంట్ వోల్టేజ్గా రూపాంతరం చెందుతుంది.
Resisting హించిన రెసిస్టర్తో పాటు స్థాపించబడిన వోల్టేజ్ ప్రస్తుత సెన్స్ ఇన్పుట్ (పిన్స్ 9 మరియు 15) తో పర్యవేక్షించబడుతుంది మరియు లోపలి 100 mV రిఫరెన్స్ పాయింట్తో పోలిస్తే.
ప్రస్తుత సెన్స్ కంపారిటర్ ఇన్పుట్లు ఇన్పుట్ కామన్ మోడ్ పరిధిలో సుమారు 3.0 వి.
100 mV కరెంట్ సెన్స్ టాలరెన్స్ అధిగమించిన సందర్భంలో, కంపారిటర్ లోయర్ సెన్స్ లాక్ను రీసెట్ చేస్తుంది మరియు అవుట్పుట్ స్విచ్ ప్రసరణను ముగుస్తుంది. ప్రస్తుత సెన్సింగ్ రెసిస్టర్ యొక్క విలువ వాస్తవానికి:
రూ = 0.1 / ఇస్టేటర్ (గరిష్టంగా)
అధిక amp పరిస్థితిలో ఉన్నప్పుడు తప్పు అవుట్పుట్ ప్రారంభమవుతుంది. లోపం యాంప్లిఫైయర్ లేదా ప్రస్తుత పరిమితి పోలిక యొక్క అవుట్పుట్ ద్వారా ముగిసినా, చేయకపోయినా, ఒక నిర్దిష్ట ఓసిలేటర్ దినచర్యలో కేవలం ఒకే అవుట్పుట్ ట్రిగ్గర్ పల్స్ ఉత్పన్నమవుతుందని ద్వంద్వ - గొళ్ళెం PWM సెట్టింగ్ నిర్ధారిస్తుంది.
ఆన్ - చిప్ 6.25 V రెగ్యులేటర్ (పిన్ 8) ఓసిలేటర్ టైమింగ్ కెపాసిటర్ కోసం ఛార్జింగ్ కరెంట్ను అందిస్తుంది, ఇది లోపం యాంప్లిఫైయర్ యొక్క రిఫరెన్స్ పాయింట్, ఇది తక్కువ వోల్టేజ్ ప్రోగ్రామ్లలో సెన్సార్లను ప్రత్యేకంగా శక్తివంతం చేయడానికి తగిన 20 mA కరెంట్ను సరఫరా చేయడానికి వీలు కల్పిస్తుంది.
పెద్ద వోల్టేజ్ ప్రయోజనాలలో, రెగ్యులేటర్ నుండి విడుదలయ్యే శక్తిని ఐసి నుండి మార్పిడి చేయడానికి ఇది చాలా ముఖ్యమైనది. మూర్తి 22 లో చూపిన విధంగా ఇది ఖచ్చితంగా మరొక పాస్ ట్రాన్సిస్టర్ సహాయంతో సాధించబడుతుంది.
6.25 V బెంచ్మార్క్ పాయింట్ సూటిగా NPN సర్క్యూట్ యొక్క రెండరింగ్ను ప్రారంభించటానికి నిర్ణయించినట్లు అనిపించింది, ఎక్కడైనా Vref - VBE వేడి కంటే హాల్ ఎఫెక్ట్ సెన్సార్ల ద్వారా అవసరమైన కనీస వోల్టేజ్ను అధిగమిస్తుంది.
సరైన ట్రాన్సిస్టర్ కలగలుపు మరియు తగినంత హీట్సింకింగ్ కలిగి ఉండటం వలన, 1 ఆంపి లోడ్ కరెంట్ కొనుగోలు చేయవచ్చు.
అండర్ వోల్టేజ్-లాకౌట్
ఐసి మరియు ప్రత్యామ్నాయ పవర్ స్విచ్ ట్రాన్సిస్టర్లకు హాని తగ్గించడానికి మూడు-మార్గం అండర్వోల్టేజ్ లాకౌట్ విలీనం చేయబడింది. తక్కువ విద్యుత్ సరఫరా కారకాల సమయంలో, ఐసి మరియు సెన్సార్లు పూర్తిగా పనిచేస్తాయని మరియు తగినంత బేస్ డ్రైవ్ అవుట్పుట్ వోల్టేజ్ ఉందని ఇది నిర్ధారిస్తుంది.
ఐసి (విసిసి) మరియు తక్కువ డ్రైవ్లు (విసి) లకు సానుకూల విద్యుత్ సరఫరా ప్రతి ఒక్కటి స్వతంత్ర పోలికలచే పరిశీలించబడతాయి, అవి వాటి పరిమితులను 9.1 వి వద్ద పొందుతాయి. ఈ ప్రత్యేక దశ సాధారణ శక్తిని నడిపేటప్పుడు తక్కువ ఆర్డిఎస్ (ఆన్) సాధించడానికి అవసరమైన గేట్ రాకపోకలకు హామీ ఇస్తుంది. MOSFET పరికరాలు.
రిఫరెన్స్ నుండి హాల్ సెన్సార్లను నేరుగా శక్తివంతం చేసినప్పుడు, రిఫరెన్స్ పాయింట్ అవుట్పుట్ వోల్టేజ్ 4.5 V కింద పడిపోయిన సందర్భంలో అనుచిత సెన్సార్ ఆపరేషన్ కనిపిస్తుంది.
ఈ సమస్యను గుర్తించడానికి 3 వ పోలికను ఉపయోగించవచ్చు.
పోలికలలో ఒకటి కంటే ఎక్కువ మంది అండర్ వోల్టేజ్ పరిస్థితిని ఎంచుకున్నప్పుడు, ఫాల్ట్ అవుట్పుట్ ఆన్ చేయబడి, టాప్ పరుగులు నిలిపివేయబడతాయి మరియు బేస్ డ్రైవ్ అవుట్పుట్లు తక్కువ పాయింట్లో నిర్వహించబడతాయి.
ప్రతి పోలికలు వారి వ్యక్తిగత పరిమితులను తగ్గించేటప్పుడు వ్యాప్తి నుండి రక్షించడానికి హిస్టెరిసిస్ను కలిగి ఉంటాయి.
తప్పు అవుట్పుట్
ఓపెన్ కలెక్టర్ ఫాల్ట్ అవుట్పుట్ (పిన్ 14) ప్రాసెస్ విచ్ఛిన్నమైతే విశ్లేషణ వివరాలను అందించడానికి ఉద్దేశించబడింది. ఇది 16 mA యొక్క సింక్ ప్రస్తుత సామర్థ్యాన్ని కలిగి ఉంది మరియు కనిపించే సిగ్నల్ కోసం ప్రత్యేకంగా కాంతి ఉద్గార డయోడ్ను నడపవచ్చు. ఇంకా, ఇది మైక్రోప్రాసెసర్ పాలిత ప్రోగ్రామ్లో ఉపయోగం కోసం TTL / CMOS లాజిక్తో సౌకర్యవంతంగా అనుసంధానించబడి ఉంటుంది.
ఫాల్ట్ అవుట్పుట్ తక్కువ ప్రభావవంతంగా ఉంటుంది, అయితే తరువాతి పరిస్థితులలో ఒకటి కంటే ఎక్కువ జరుగుతుంది:
1) చెల్లని సెన్సార్ ఇన్పుట్ కోడ్లు
2) అవుట్పుట్ లాజిక్ వద్ద ప్రారంభించండి [0]
3) ప్రస్తుత సెన్స్ ఇన్పుట్ 100 mV కన్నా ఎక్కువ
4) అండర్ వోల్టేజ్ లాకౌట్, పోలికలలో 1 లేదా అంతకంటే ఎక్కువ క్రియాశీలత
5) హీట్ షట్డౌన్, వాంఛనీయ జంక్షన్ టెంప్ గరిష్టంగా పొందడం ఈ ప్రత్యేకమైన అవుట్పుట్ మోటారు స్టార్ట్-అప్ లేదా ఉప్పొంగే పరిస్థితిలో భరించే పనితీరు మధ్య చెప్పడానికి కూడా ఉపయోగపడుతుంది.
ఫాల్ట్ అవుట్పుట్ మరియు ఎనేబుల్ ఇన్పుట్ మధ్య ఆర్సి నెట్వర్క్ సహాయంతో, ఓవర్కంటెంట్కు సంబంధించి మీరు సమయం-ఆలస్యం లాచెడ్ షట్డౌన్ను అభివృద్ధి చేయవచ్చని దీని అర్థం.
మూర్తి 23 లో ప్రదర్శించబడే అదనపు సర్క్యూట్రీ అనుబంధ పిక్-అప్ టార్క్ ఇవ్వడం ద్వారా అధిక జడత్వ భారాలతో అమర్చబడిన మోటారు వ్యవస్థలను అప్రయత్నంగా ప్రారంభించడానికి సహాయపడుతుంది, అదే సమయంలో ఓవర్కంటెంట్ రక్షణను సురక్షితంగా కాపాడుతుంది. స్థిర పరిమితికి కనీస విలువ కంటే ప్రస్తుత పరిమితిని తదుపరిదానికి ఉంచడం ద్వారా ఈ పని సాధించబడుతుంది. చాలా సుదీర్ఘమైన ఓవర్కరెంట్ పరిస్థితిలో, కెపాసిటర్ సిడిఎల్వై ఛార్జ్ చేస్తుంది, ఇది తక్కువ స్థితికి దాని సహనాన్ని అధిగమించడానికి ఎనేబుల్ ఇన్పుట్ను ప్రేరేపిస్తుంది.
ఫాల్ట్ అవుట్పుట్ నుండి అవుట్పుట్ ఎనేబుల్ వరకు సానుకూల స్పందన చక్రం ద్వారా ఇప్పుడు గొళ్ళెం ఆకారంలో ఉంటుంది. ప్రస్తుత సెన్స్ ఇన్పుట్ ద్వారా సెట్ చేయబడినప్పుడు, దీనిని CDLY ని తగ్గించడం ద్వారా లేదా విద్యుత్ సరఫరాలను సైక్లింగ్ చేయడం ద్వారా మాత్రమే రీసెట్ చేయవచ్చు.
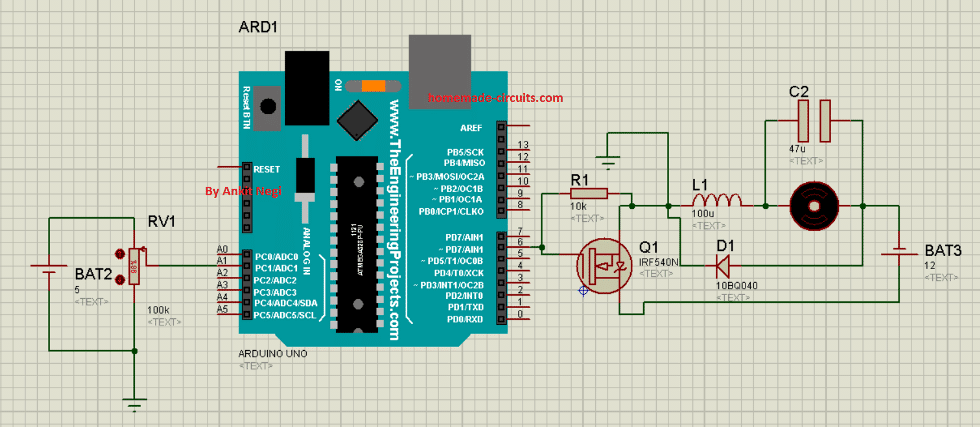
పూర్తిగా ఫంక్షనల్ హై వాటేజ్ BLDC స్కీమాటిక్
పైన వివరించిన పరికరాన్ని ఉపయోగించి పూర్తిగా పనిచేసే అధిక వాటేజ్, అధిక ప్రస్తుత BLDC కంట్రోలర్ సర్క్యూట్ క్రింద చూడవచ్చు, ఇది పూర్తి-తరంగ, 3-దశ, 6-దశల మోడ్ వలె కాన్ఫిగర్ చేయబడింది:

మునుపటి: వోల్టేజ్ లెక్కిస్తోంది, బక్ ఇండక్టర్లో కరెంట్ తర్వాత: ఈ ఎలక్ట్రిక్ స్కూటర్ / రిక్షా సర్క్యూట్ చేయండి