ఈ పోస్ట్లో మనం సర్వో మోటర్ అంటే ఏమిటి, అది ఎలా పనిచేస్తుంది, మైక్రోకంట్రోలర్తో ఎలా ఇంటర్ఫేస్ చేయాలి మరియు ఇతర మోటారుల నుండి ఈ మోటారును ప్రత్యేకంగా ఏమి చేయాలో తెలుసుకోబోతున్నాం.
ఎలక్ట్రానిక్స్ i త్సాహికుడైనందున మనం అనేక రకాల మోటార్లు చూస్తాము, ఇక్కడ మేము సర్వో మోటర్ అని పిలువబడే ప్రత్యేకమైన మోటారును పరిశీలించబోతున్నాము.
సర్వో మోటార్ అంటే ఏమిటి?
సర్వో మోటారు లేదా సర్వో అనేది ఒక ప్రత్యేకమైన మోటారు, ఇది స్థానం, త్వరణం మరియు వేగం మీద ఖచ్చితమైన నియంత్రణ కోసం రూపొందించబడింది. అన్ని ఇతర రకాల మోటారుల మాదిరిగా కాకుండా, సర్వో 180 డిగ్రీల ద్వి-దిశాత్మకతను మాత్రమే తిప్పగలదు. ఇది మెకానికల్ గేర్లు మరియు స్టాపర్ కలిగి ఉంది, ఇది సర్వో యొక్క కోణీయ భ్రమణాన్ని పరిమితం చేస్తుంది.
సాధారణ సర్వో మోటార్:

రోబోటిక్స్, సిసిటివి కెమెరాలు, ఆర్సి కార్లు, పడవలు, బొమ్మ విమానాలు మొదలైన వాటిలో సర్వో మోటార్లు ఉపయోగించబడతాయి. మనకు అవసరం లేని చోట సర్వోలు ఉపయోగించబడతాయి, అయితే భ్రమణ కదలికను కొనసాగించడం అవసరం లేదు, కానీ ఒక నిర్దిష్ట స్థితిలో లాక్ చేయండి లేదా కదిలే కోణీయ పరిమితిలో నియంత్రిత వేగంతో కొంత లోడ్ను తరలించండి.
సర్వో కేవలం ఇతర రకాల మాదిరిగా మోటారు కాదు, అయితే ఇది మాడ్యూల్, ఇది సాధారణ DC / AC మోటారు, గేర్ల సమూహం, నియంత్రణ ఎలక్ట్రానిక్స్ మరియు చూడు వ్యవస్థను మిళితం చేస్తుంది. పేర్కొన్న ప్రతి దశలను వివరంగా చూద్దాం.
సర్వో మాడ్యూల్లో పనిచేసే DC / AC మోటారు బ్రష్లెస్ లేదా బ్రష్డ్ మోటర్ కావచ్చు, చాలా అభిరుచి గల సర్వోస్ DC మోటారును ఉపయోగిస్తారు మరియు పారిశ్రామిక అనువర్తనాల్లో AC మోటార్లు ఉపయోగించబడతాయి. మోటారు సర్వోకు భ్రమణ ఇన్పుట్ ఇస్తుంది. మోటారు సర్వో లోపల అనేక వందల RPM వద్ద తిరుగుతుంది మరియు అవుట్పుట్ భ్రమణం దాని RPM కంటే 50 లేదా అంతకంటే ఎక్కువ రెట్లు తక్కువగా ఉంటుంది.
తదుపరి దశ గేర్ అసెంబ్లీ, ఇది కోణీయ భ్రమణం మరియు సర్వో వేగాన్ని నియంత్రిస్తుంది. లోడ్ ఎంత స్థూలంగా ఉందో బట్టి గేర్ను ప్లాస్టిక్ లేదా లోహం నుండి తయారు చేయవచ్చు. సాధారణంగా DC మోటార్లు అధిక RPM వద్ద నడుస్తాయి మరియు తక్కువ టార్క్ గేర్ అసెంబ్లీ అదనపు RPM ను టార్క్ గా మారుస్తుంది. అందువలన ఒక చిన్న మోటారు భారీ భారాన్ని నిర్వహించగలదు.
తదుపరి దశ కంట్రోల్ ఎలక్ట్రానిక్స్, ఇది మోటారు యొక్క భ్రమణాన్ని నియంత్రించడానికి MOSFET లు మరియు IC లను కలిగి ఉంటుంది. యాక్యుయేటర్ యొక్క ప్రస్తుత స్థానాన్ని ట్రాక్ చేయడానికి సర్వో మోటారులలో చూడు వ్యవస్థ ఎల్లప్పుడూ ఉంటుంది.
సర్వోస్లో సాధారణంగా చూడు భాగం ఒక పొటెన్షియోమీటర్, ఇది నేరుగా భ్రమణ యాక్యుయేటర్తో అనుసంధానించబడుతుంది. పొటెన్షియోమీటర్ వోల్టేజ్ డివైడర్గా పనిచేస్తుంది, ఇది కంట్రోల్ ఎలక్ట్రానిక్స్కు ఇవ్వబడుతుంది. ఈ అభిప్రాయం మోటారుకు ఇచ్చిన శక్తిని నిర్ణయించడానికి ఎలక్ట్రానిక్లను నియంత్రించడంలో సహాయపడుతుంది.
ఏదైనా బాహ్య శక్తి భంగం కలిగించడానికి ప్రయత్నిస్తే, స్థిరమైన స్థితిలో ఉన్న సర్వో మోటారు ప్రస్తుత స్థానం నుండి కదలకుండా ఉంటుంది. చూడు వ్యవస్థ ప్రస్తుత స్థితిని పర్యవేక్షిస్తుంది మరియు బాహ్య ఆటంకాలకు వ్యతిరేకంగా మోటారుకు శక్తినిస్తుంది.
సర్వో దాని యాక్యుయేటర్ను కదిలిస్తున్నప్పుడు పై దృశ్యం ఒకటే. నియంత్రణ వ్యవస్థ బాహ్య శక్తిని భర్తీ చేస్తుంది మరియు నిర్ణీత వేగంతో కదులుతుంది.
సర్వో మోటారు మరియు దాని పనితీరు విధానం గురించి ఇప్పుడు మీకు కొంచెం తెలుసు. మైక్రోకంట్రోలర్ ఉపయోగించి సర్వో మోటార్లు ఎలా నియంత్రించాలో చూద్దాం.
సర్వో మోటార్లు 2 టెర్మినల్స్ కలిగి ఉన్న ఇతర మోటార్లు కాకుండా 3 టెర్మినల్స్ కలిగివున్నాయి, రెండు సరఫరా (5 వి నామమాత్ర) మరియు కంట్రోల్ సిగ్నల్ కోసం ఒకటి. టెర్మినల్స్ సులభంగా గుర్తించడానికి వైర్లు రంగులో ఉంటాయి.
సర్వోస్ యొక్క నియంత్రణ సంకేతాలు 50Hz పౌన .పున్యంలో PWM. సిగ్నల్ యొక్క పల్స్ వెడల్పు యాక్యుయేటర్ ఆర్మ్ యొక్క స్థానాన్ని నిర్ణయిస్తుంది. ఒక సాధారణ అభిరుచి సర్వో మోటార్ 1 నుండి 2 మిల్లీసెకన్ల పల్స్ వెడల్పు వరకు పనిచేస్తుంది.
1 ఎంఎస్ పల్స్ వెడల్పు నియంత్రణ సిగ్నల్ను వర్తింపజేస్తే యాక్యుయేటర్ను 0 డిగ్రీల స్థానంలో ఉంచుతుంది. 2 ఎంఎస్ పల్స్ వెడల్పు నియంత్రణ సిగ్నల్ను వర్తింపజేస్తే యాక్యుయేటర్ 180 డిగ్రీల స్థానంలో ఉంటుంది. 1-2 ఎంఎస్ల మధ్య సిగ్నల్లను వర్తింపజేయడం వల్ల యాక్చుయేటర్ను 0-180 డిగ్రీల కోణంలో ఉంచుతుంది. క్రింద ఉన్న చిత్రం ద్వారా దీనిని బాగా అర్థం చేసుకోవచ్చు.

పల్స్ వెడల్పు మాడ్యులేషన్ (పిడబ్ల్యుఎం) ద్వారా సర్వో ఎలా నియంత్రించబడుతుందో ఇప్పుడు మీరు అర్థం చేసుకున్నారు.
Arduino తో సర్వో మోటారును ఎలా ఇంటర్ఫేస్ చేయాలో ఇప్పుడు తెలుసుకుందాం.
సర్క్యూట్ రేఖాచిత్రం:

వైరింగ్ సులభం మరియు స్వీయ వివరణాత్మకమైనది. మీరు స్థూలమైన సర్వో మోటారును ఉపయోగిస్తుంటే మీకు బాహ్య విద్యుత్ సరఫరా అవసరం. మీరు ఆర్డునో విద్యుత్ సరఫరా నుండి శక్తినివ్వడానికి ప్రయత్నిస్తే, మీరు కంప్యూటర్లోని యుఎస్బి పోర్ట్ను ఓవర్లోడ్ చేస్తారు.
మీరు వ్యాసం ప్రారంభంలో వివరించబడిన సర్వో సారూప్యతను కలిగి ఉంటే, అప్పుడు మీరు దానిని రచయిత యొక్క నమూనాలో చూపిన ఆర్డునో 5 వి సరఫరా నుండి శక్తినివ్వవచ్చు.
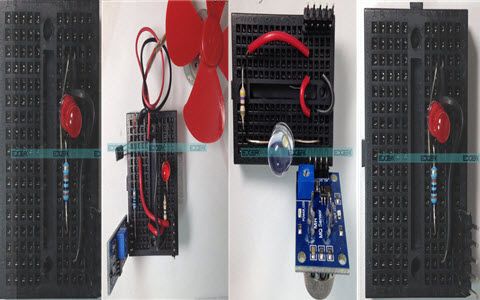
రచయిత యొక్క నమూనా:

ఆర్డునోకు దీన్ని నిర్వహించడానికి సర్వో లైబ్రరీ అవసరం, ఇది మా పనిని సులభతరం చేసింది మరియు ఇది ఇప్పటికే ఆర్డునో ఐడిఇలో ఉంది.
కార్యక్రమం:
//--------Program developed by R.Girish--------//
#include
Servo motor
int pos = 0
int t=10
void setup()
{
motor.attach(7)
}
void loop()
{
A:
pos=pos+1
motor.write(pos)
delay(t)
if(pos==180) { goto B}
goto A
B:
pos=pos-1
motor.write(pos)
delay(t)
if(pos==0) { goto A}
goto B
}
//--------Program developed by R.Girish--------//
పై ప్రోగ్రామ్ యాక్చుయేటర్ 0 నుండి 180 డిగ్రీల కుడి మరియు 180 నుండి 0 డిగ్రీల ఎడమ మరియు చక్రం పునరావృతమవుతుంది. మీ అనుకూలీకరించిన అనువర్తనాల కోసం మీరు మీ స్వంత కోడ్ను వ్రాయవలసి ఉన్న సర్వోను పరీక్షించడానికి ఇది ఒక సాధారణ ప్రోగ్రామ్.
మునుపటి: రెండు పైప్ వాటర్ పంప్ వాల్వ్ కంట్రోలర్ సర్క్యూట్ తర్వాత: మోటార్సైకిల్ వోల్టేజ్ రెగ్యులేటర్ వైరింగ్ను అర్థం చేసుకోవడం