సమర్పించిన 3 దశ VFD సర్క్యూట్ ( నా చేత రూపొందించబడింది ) ఏదైనా మూడు దశల బ్రష్ చేసిన ఎసి మోటారు లేదా బ్రష్ లేని ఎసి మోటారు వేగాన్ని నియంత్రించడానికి ఉపయోగించవచ్చు. ఈ ఆలోచనను మిస్టర్ టామ్ అభ్యర్థించారు
VFD ని ఉపయోగించడం
ప్రతిపాదిత 3-దశల VFD సర్క్యూట్ చాలా 3-దశల AC మోటారులకు విశ్వవ్యాప్తంగా వర్తించబడుతుంది, ఇక్కడ నియంత్రణ సామర్థ్యం చాలా క్లిష్టమైనది కాదు.
దీన్ని నియంత్రించడానికి ప్రత్యేకంగా ఉపయోగించవచ్చు స్క్విరెల్ కేజ్ ఇండక్షన్ మోటార్ వేగం ఓపెన్ లూప్ మోడ్తో, మరియు క్లోజ్డ్ లూప్ మోడ్లో కూడా ఉండవచ్చు, ఇది వ్యాసం యొక్క తరువాతి భాగంలో చర్చించబడుతుంది.
3 దశ ఇన్వర్టర్ కోసం గుణకాలు అవసరం
ప్రతిపాదిత 3 దశ VFD లేదా వేరియబుల్ ఫ్రీక్వెన్సీ డ్రైవ్ సర్క్యూట్ రూపకల్పన కోసం ఈ క్రింది ప్రాథమిక సర్క్యూట్ దశలు తప్పనిసరిగా అవసరం:
- పిడబ్ల్యుఎం వోల్టేజ్ కంట్రోలర్ సర్క్యూట్
- 3 దశ హై సైడ్ / లో సైడ్ హెచ్-బ్రిడ్జ్ డ్రైవర్ సర్క్యూట్
- 3 దశ జనరేటర్ సర్క్యూట్
- V / Hz పరామితిని ఉత్పత్తి చేయడానికి ఫ్రీక్వెన్సీ కన్వర్టర్ సర్క్యూట్కు వోల్టేజ్.
కింది వివరణ సహాయంతో పై దశల పనితీరు వివరాలను తెలుసుకుందాం:
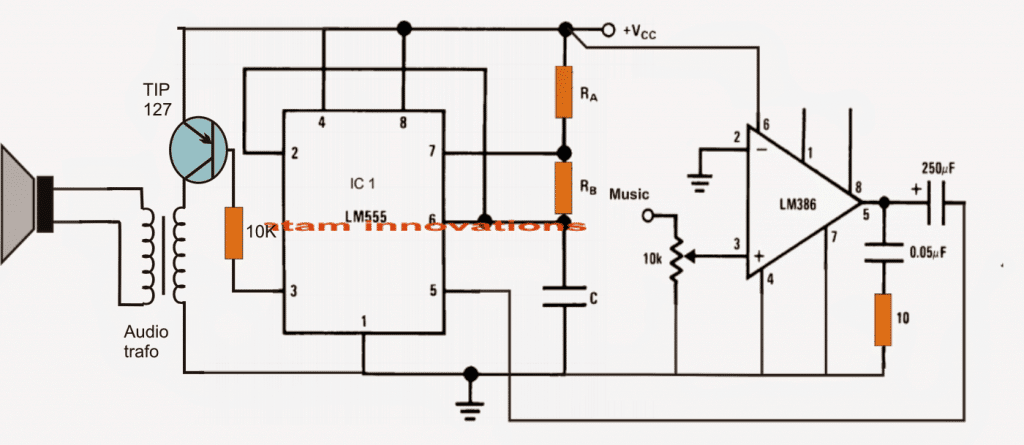
క్రింద ఇచ్చిన రేఖాచిత్రంలో సాధారణ PWM వోల్టేజ్ కంట్రోలర్ సర్క్యూట్ చూడవచ్చు:

పిడబ్ల్యుఎం కంట్రోలర్
పైన పేర్కొన్న పిడబ్ల్యుఎం జెనరేటర్ దశ యొక్క పనితీరును నేను ఇప్పటికే విలీనం చేసాను మరియు వివరించాను, ఇది ప్రాథమికంగా అదే ఐసి యొక్క పిన్ 5 వద్ద వర్తించే సంభావ్యతకు ప్రతిస్పందనగా ఐసి 2 యొక్క పిన్ 3 అంతటా విభిన్న పిడబ్ల్యుఎం అవుట్పుట్ను రూపొందించడానికి రూపొందించబడింది.
రేఖాచిత్రంలో చూపిన 1 కె ప్రీసెట్ RMS కంట్రోల్ నాబ్, ఇది మరింత ప్రాసెసింగ్ కోసం IC2 యొక్క పిన్ 3 వద్ద పిడబ్ల్యుఎంల రూపంలో అవుట్పుట్ వోల్టేజ్ యొక్క కావలసిన అనులోమానుపాత మొత్తాన్ని పొందటానికి తగిన విధంగా సర్దుబాటు చేయవచ్చు. మెయిన్స్ 220 వి లేదా 120 వి ఎసి ఆర్ఎంఎస్కు సమానమైన సంబంధిత అవుట్పుట్ను ఉత్పత్తి చేయడానికి ఇది సెట్ చేయబడింది.
హెచ్-బ్రిడ్జ్ డ్రైవర్ సర్క్యూట్
దిగువ తదుపరి రేఖాచిత్రం IC IRS2330 ఉపయోగించి ఒకే చిప్ H- బ్రిడ్జ్ 3 ఫేజ్ డ్రైవర్ సర్క్యూట్ను చూపిస్తుంది.
చిప్స్లో అంతర్నిర్మిత అధునాతన సర్క్యూట్రీ ద్వారా చాలా సంక్లిష్టతలు నిర్వహించబడుతున్నందున డిజైన్ సూటిగా కనిపిస్తుంది.
3 దశల సిగ్నల్ జెనరేటర్ దశ ద్వారా బాగా లెక్కించిన 3 దశ సిగ్నల్ IC యొక్క HIN1 / 2/3 మరియు LIN1 / 2/3 ఇన్పుట్లలో వర్తించబడుతుంది.
యొక్క అవుట్పుట్లు IC IRS2330 6 మోస్ఫెట్లు లేదా ఐజిబిటిల బ్రిడ్జ్ నెట్వర్క్తో విలీనం చేయబడిందని చూడవచ్చు, దీని కాలువలు నియంత్రించాల్సిన మోటారుతో తగిన విధంగా కాన్ఫిగర్ చేయబడతాయి.
తక్కువ సైడ్ మోస్ఫెట్ / ఐజిబిటి గేట్లు వంతెన మోస్ఫెట్ దశలో పిడబ్ల్యుఎం ఇంజెక్షన్ను ప్రారంభించడానికి పైన చర్చించిన పిడబ్ల్యుఎం జెనరేటర్ సర్క్యూట్ దశలో ఐసి 2 పిన్ # 3 తో అనుసంధానించబడి ఉన్నాయి. ఈ నియంత్రణ చివరికి మోటారుకు సెట్టింగుల ప్రకారం కావలసిన వేగాన్ని పొందడానికి సహాయపడుతుంది (మొదటి రేఖాచిత్రంలో 1 k ప్రీసెట్ ద్వారా).

కింది రేఖాచిత్రంలో మేము అవసరమైన 3 దశ సిగ్నల్ జనరేటర్ సర్క్యూట్ను దృశ్యమానం చేస్తాము.

3-దశ జనరేటర్ సర్క్యూట్ను కాన్ఫిగర్ చేస్తోంది
3 దశల జనరేటర్ CMOS చిప్స్ CD4035 మరియు CD4009 ల చుట్టూ నిర్మించబడింది, ఇది చూపిన పిన్అవుట్లలో ఖచ్చితంగా కొలత 3 దశ సంకేతాలను ఉత్పత్తి చేస్తుంది.
3 దశ సిగ్నల్స్ యొక్క ఫ్రీక్వెన్సీ ఫెడ్ ఇన్పుట్ గడియారాలపై ఆధారపడి ఉంటుంది, ఇది ఉద్దేశించిన 3 దశ సిగ్నల్ కంటే 6 రెట్లు ఉండాలి. అర్థం, అవసరమైన 3 దశల పౌన frequency పున్యం 50 Hz అయితే, ఇన్పుట్ గడియారం 50 x 6 = 300 Hz ఉండాలి.
డ్రైవర్ ఐసి యొక్క ప్రభావవంతమైన పౌన frequency పున్యాన్ని మార్చడానికి పై గడియారాలు వైవిధ్యంగా ఉండవచ్చని కూడా ఇది సూచిస్తుంది, ఇది మోటారు కార్యాచరణ పౌన .పున్యాన్ని మార్చడానికి బాధ్యత వహిస్తుంది.
అయితే వేర్వేరు వోల్టేజ్కి ప్రతిస్పందనగా పై ఫ్రీక్వెన్సీ మార్పు స్వయంచాలకంగా ఉండాలి కాబట్టి, ఫ్రీక్వెన్సీ కన్వర్టర్కు వోల్టేజ్ అవసరం అవుతుంది. తదుపరి దశ అవసరమైన అమలు కోసం ఫ్రీక్వెన్సీ కన్వర్టర్ సర్క్యూట్కు సరళమైన ఖచ్చితమైన వోల్టేజ్ గురించి చర్చిస్తుంది.
స్థిరమైన V / F నిష్పత్తిని ఎలా సృష్టించాలి
సాధారణంగా ఇండక్షన్ మోటారులలో, మోటారు వేగం మరియు టోక్ యొక్క సరైన సామర్థ్యాన్ని నిర్వహించడానికి, స్లిప్ వేగం లేదా రోటర్ వేగాన్ని నియంత్రించాల్సిన అవసరం ఉంది, ఇది స్థిరమైన V / Hz నిష్పత్తిని నిర్వహించడం ద్వారా సాధ్యమవుతుంది. ఇన్పుట్ సరఫరా పౌన frequency పున్యంతో సంబంధం లేకుండా స్టేటర్ మాగ్నెటిక్ ఫ్లక్స్ ఎల్లప్పుడూ స్థిరంగా ఉంటుంది కాబట్టి, రోటర్ వేగం సులభంగా నియంత్రించబడుతుంది V / Hz నిష్పత్తి స్థిరాంకాన్ని నిర్వహిస్తుంది .
ఓపెన్ లూప్ మోడ్లో, ముందుగా నిర్ణయించిన V / Hz నిష్పత్తులను నిర్వహించడం ద్వారా మరియు దీన్ని మానవీయంగా అమలు చేయడం ద్వారా దీన్ని సుమారుగా చేయవచ్చు. ఉదాహరణకు మొదటి రేఖాచిత్రంలో ఇది R1 మరియు 1K ప్రీసెట్ను తగిన విధంగా సర్దుబాటు చేయడం ద్వారా చేయవచ్చు. R1 ఫ్రీక్వెన్సీని నిర్ణయిస్తుంది మరియు 1K అవుట్పుట్ యొక్క RMS ను సర్దుబాటు చేస్తుంది, కాబట్టి రెండు పారామితులను సముచితంగా సర్దుబాటు చేయడం ద్వారా మేము అవసరమైన మొత్తాన్ని V / Hz ను మానవీయంగా అమలు చేయవచ్చు.
అయితే ఇండక్షన్ మోటారు టార్క్ మరియు వేగం యొక్క సాపేక్షంగా ఖచ్చితమైన నియంత్రణను పొందడానికి, మేము క్లోజ్డ్ లూప్ స్ట్రాటజీని అమలు చేయాలి, దీనిలో V / Hz నిష్పత్తి యొక్క స్వయంచాలక సర్దుబాటు కోసం స్లిప్ స్పీడ్ డేటాను ప్రాసెసింగ్ సర్క్యూట్కు అందించాల్సిన అవసరం ఉంది. విలువ ఎల్లప్పుడూ స్థిరంగా ఉంటుంది.
క్లోజ్డ్ లూప్ అభిప్రాయాన్ని అమలు చేస్తోంది
దిగువ చూపిన విధంగా క్లోజ్డ్ లూప్ ఆటోమేటిక్ V / Hz రెగ్యులేషన్ రూపకల్పన కోసం ఈ పేజీలోని మొదటి రేఖాచిత్రం తగిన విధంగా సవరించబడుతుంది:

పై చిత్రంలో, IC2 యొక్క పిన్ # 5 వద్ద ఉన్న సంభావ్యత SPWM యొక్క వెడల్పును నిర్ణయిస్తుంది, ఇది అదే IC యొక్క పిన్ # 3 వద్ద ఉత్పత్తి అవుతుంది. పిన్ # 5 వద్ద ఉన్న మెయిన్స్ 12 వి అలల నమూనాను ఐసి 2 యొక్క పిన్ # 7 వద్ద త్రిభుజం తరంగంతో పోల్చడం ద్వారా SPWM ఉత్పత్తి అవుతుంది మరియు ఇది మోటారు నియంత్రణ కోసం తక్కువ వైపు మోస్ఫెట్లకు ఇవ్వబడుతుంది.
ప్రారంభంలో ఈ SPWM కొన్ని సర్దుబాటు స్థాయిలో (1K పర్సెట్ ఉపయోగించి) సెట్ చేయబడింది, ఇది నిర్దేశిత నామమాత్రపు వేగ స్థాయిలో రోటర్ కదలికను ప్రారంభించడానికి 3-దశల వంతెన యొక్క తక్కువ వైపు IGBT గేట్లను ప్రేరేపిస్తుంది.
రోటర్ రోటర్ తిరగడం ప్రారంభించిన వెంటనే, రోటర్ మెకానిజంతో జతచేయబడిన టాచోమీటర్ IC2 యొక్క పిన్ # 5 వద్ద అనులోమానుపాత అదనపు వోల్టేజ్ అభివృద్ధి చెందుతుంది, ఇది నిష్పత్తిలో SPWM లు విస్తృతంగా పొందడానికి కారణమవుతుంది, దీని వలన మోటారు యొక్క స్టేటర్ కాయిల్స్కు ఎక్కువ వోల్టేజ్ వస్తుంది. ఇది రోటర్ వేగంలో మరింత పెరుగుదలకు కారణమవుతుంది, ఇది IC2 యొక్క పిన్ # 5 వద్ద ఎక్కువ వోల్టేజ్కు కారణమవుతుంది మరియు SPWM సమానమైన వోల్టేజ్ ఇకపై పెరగదు మరియు స్టేటర్ రోటర్ సింక్రొనైజేషన్ స్థిరమైన స్థితిని సాధించే వరకు ఇది కొనసాగుతుంది.
పై విధానం మోటారు యొక్క కార్యాచరణ వ్యవధిలో స్వీయ సర్దుబాటుపై కొనసాగుతుంది.
టాచోమీటర్ను ఎలా తయారు చేయాలి మరియు సమగ్రపరచాలి
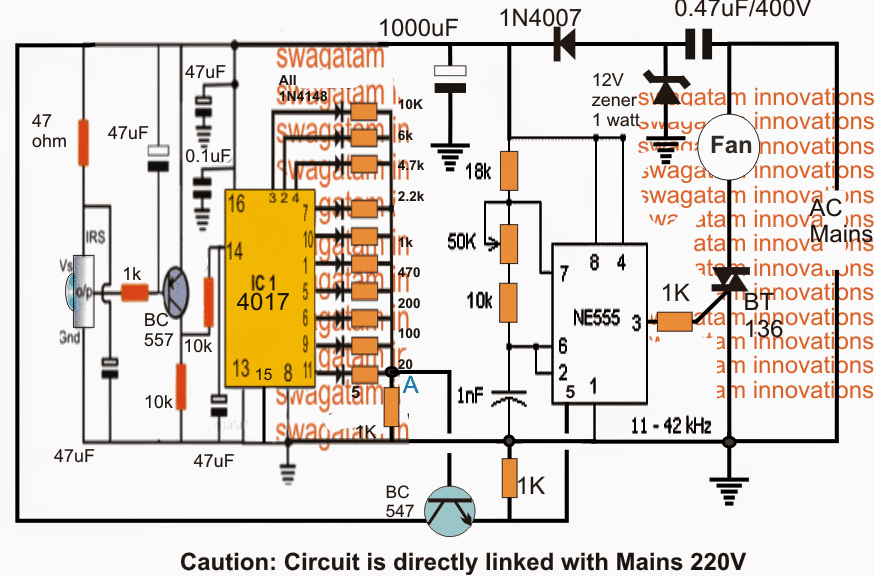
కింది రేఖాచిత్రంలో సరళమైన టాకోమీటర్ రూపకల్పన చూడవచ్చు, దీనిని రోటర్ మెకానిజంతో అనుసంధానించవచ్చు, భ్రమణ పౌన frequency పున్యం BC547 యొక్క ఆధారాన్ని పోషించగలదు.

ఇక్కడ రోటర్ స్పీడ్ డేటా హాల్ ఎఫెక్ట్ సెన్సార్ లేదా ఐఆర్ ఎల్ఇడి / సెన్సార్ నెట్వర్క్ నుండి సేకరించి టి 1 యొక్క స్థావరానికి ఇవ్వబడుతుంది.
T1 ఈ పౌన frequency పున్యంలో డోలనం చేస్తుంది మరియు IC 555 మోనోస్టేబుల్ సర్క్యూట్ను సముచితంగా కాన్ఫిగర్ చేయడం ద్వారా తయారు చేసిన టాకోమీటర్ సర్క్యూట్ను సక్రియం చేస్తుంది.
పైన పేర్కొన్న టాకోమీటర్ నుండి అవుట్పుట్ T1 యొక్క బేస్ వద్ద ఇన్పుట్ ఫ్రీక్వెన్సీకి ప్రతిస్పందనగా దామాషా ప్రకారం మారుతుంది.
ఫ్రీక్వెన్సీ తీవ్ర కుడి వైపున వోల్టేజ్ పెరిగేకొద్దీ D3 అవుట్పుట్ కూడా పెరుగుతుంది మరియు దీనికి విరుద్ధంగా ఉంటుంది మరియు V / Hz నిష్పత్తిని సాపేక్షంగా స్థిరమైన స్థాయికి ఉంచడానికి సహాయపడుతుంది.
వేగాన్ని ఎలా నియంత్రించాలి
IC 4035 యొక్క క్లాక్ ఇన్పుట్ వద్ద ఫ్రీక్వెన్సీ ఇన్పుట్ను మార్చడం ద్వారా స్థిరమైన V / F ను ఉపయోగించి మోటారు వేగాన్ని సాధించవచ్చు. IC 555 అస్టేబుల్ సర్క్యూట్ లేదా ఏదైనా ప్రామాణిక అస్టేబుల్ సర్క్యూట్ నుండి వేరియబుల్ ఫ్రీక్వెన్సీని ఫీడ్ చేయడం ద్వారా దీనిని సాధించవచ్చు. ఐసి 4035.
ఫ్రీక్వెన్సీని మార్చడం మోటారు యొక్క ఆపరేటింగ్ ఫ్రీక్వెన్సీని సమర్థవంతంగా మారుస్తుంది, ఇది స్లిప్ వేగాన్ని తగ్గిస్తుంది.
ఇది టాచోమీటర్ ద్వారా కనుగొనబడింది, మరియు టాకోమీటర్ IC2 యొక్క పిన్ # 5 వద్ద ఉన్న సామర్థ్యాన్ని దామాషా ప్రకారం తగ్గిస్తుంది, ఇది మోటారుపై SPWM కంటెంట్ను దామాషా ప్రకారం తగ్గిస్తుంది మరియు తత్ఫలితంగా మోటారుకు వోల్టేజ్ తగ్గుతుంది, మోటారు వేగం వ్యత్యాసాన్ని సరైనదిగా నిర్ధారిస్తుంది అవసరమైన V / F నిష్పత్తి.
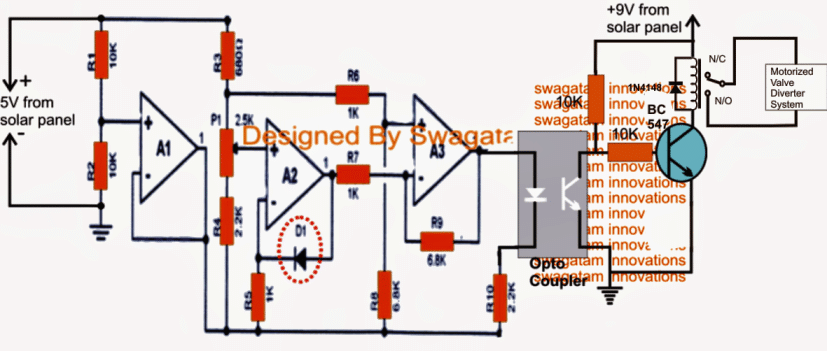
ఇంట్లో తయారు చేసిన V నుండి F కన్వర్టర్

పై వోల్టేజ్ టు ఫ్రీక్వెన్సీ కన్వర్టర్ సర్క్యూట్లో IC 4060 ఉపయోగించబడుతుంది మరియు దాని ఫ్రీక్వెన్సీ డిపెండెంట్ రెసిస్టెన్స్ LED / LDR అసెంబ్లీ ద్వారా ఉద్దేశించిన మార్పిడుల కోసం ప్రభావితమవుతుంది.
LED / LDR అసెంబ్లీ లైట్ ప్రూఫ్ బాక్స్ లోపల మూసివేయబడుతుంది మరియు LDR IC యొక్క 1M ఫ్రీక్వెన్సీ డిపెండెంట్ రెసిస్టర్లో ఉంచబడుతుంది.
LDR / LDR ప్రతిస్పందన చాలా సరళంగా ఉన్నందున, LDR పై LED యొక్క మారుతున్న ప్రకాశం IC యొక్క పిన్ 3 అంతటా దామాషా ప్రకారం మారుతున్న (పెరుగుతున్న లేదా తగ్గుతున్న) ఫ్రీక్వెన్సీని ఉత్పత్తి చేస్తుంది.
1M రెసిస్టర్ను లేదా C1 విలువను సముచితంగా ఏర్పాటు చేయడం ద్వారా దశ యొక్క FSD లేదా V / Hz పరిధిని సెట్ చేయవచ్చు.
LED ఈజ్ వోల్టేజ్ మొదటి PWM సర్క్యూట్ దశ నుండి PWM ల ద్వారా ఉద్భవించింది మరియు ప్రకాశిస్తుంది. PWM లు మారుతున్నప్పుడు, LED ప్రకాశం కూడా మారుతూ ఉంటుంది, ఇది పై రేఖాచిత్రంలో IC 4060 యొక్క పిన్ 3 వద్ద దామాషా ప్రకారం పెరుగుతున్న లేదా తగ్గుతున్న పౌన frequency పున్యానికి దారితీస్తుంది.
VFD తో కన్వర్టర్ను సమగ్రపరచడం
IC 4060 నుండి మారుతున్న ఈ ఫ్రీక్వెన్సీని ఇప్పుడు 3 ఫేజ్ జనరేటర్ IC CD4035 క్లాక్ ఇన్పుట్తో అనుసంధానించాలి.
పై దశలు 3 దశల VFD సర్క్యూట్ తయారీకి ప్రధాన పదార్థాలను ఏర్పరుస్తాయి.
ఇప్పుడు, IGBT మోటారు కంట్రోలర్లను సరఫరా చేయడానికి అవసరమైన DC BUS గురించి మరియు మొత్తం రూపకల్పనకు సంబంధించిన విధానాలను ఏర్పాటు చేయడం గురించి చర్చించడం చాలా ముఖ్యం.
కింది సర్క్యూట్ కాన్ఫిగరేషన్ను ఉపయోగించి అందుబాటులో ఉన్న 3 ఫేజ్ మెయిన్స్ ఇన్పుట్ను సరిదిద్దడం ద్వారా IGBT H- బ్రిడ్జ్ పట్టాలపై వర్తించే DC BUS పొందవచ్చు. IGBT DC BUS పట్టాలు 'లోడ్' గా సూచించబడిన పాయింట్లలో అనుసంధానించబడి ఉన్నాయి

ఒకే దశ మూలం కోసం ప్రామాణిక 4 డయోడ్ బ్రిడ్జ్ నెట్వర్క్ కాన్ఫిగరేషన్ను ఉపయోగించి సరిదిద్దడం అమలు చేయవచ్చు.
ప్రతిపాదిత 3 దశ VFD సర్క్యూట్ను ఎలా సెటప్ చేయాలి
కింది సూచనల ప్రకారం ఇది చేయవచ్చు:
IGBT లలో DC మోటారు వోల్టేజ్ను వర్తింపజేసిన తరువాత (మోటారు కనెక్ట్ లేకుండా) పట్టాల మీదుగా వోల్టేజ్ ఉద్దేశించిన మోటారు వోల్టేజ్ స్పెక్స్కు సమానంగా మారే వరకు PWM 1k ప్రీసెట్ను సర్దుబాటు చేయండి.
ఇచ్చిన మోటారు స్పెసిఫికేషన్ల ప్రకారం ఏదైనా IC IRS2330 ఇన్పుట్లను అవసరమైన సరైన ఫ్రీక్వెన్సీ స్థాయికి సర్దుబాటు చేయడానికి తరువాత IC 4060 1M ప్రీసెట్ను సర్దుబాటు చేయండి.
పై విధానాలు పూర్తయిన తరువాత, పేర్కొన్న మోటారును వేర్వేరు వోల్టేజ్ స్థాయిలు, V / Hz పారామితితో అనుసంధానించవచ్చు మరియు సరఫరా చేయవచ్చు మరియు కనెక్ట్ చేయబడిన మోటారుపై ఆటోమేటిక్ V / Hz ఆపరేషన్ల కోసం నిర్ధారించబడుతుంది.
మునుపటి: గ్రో లైట్ సర్క్యూట్ ఎలా నిర్మించాలి తర్వాత: వాటర్ మృదుల సర్క్యూట్ అన్వేషించబడింది