రోబోట్కు సంక్షిప్త పరిచయం:
రోబోట్ అనేది పూర్తిగా ఆటోమేటిక్ అయిన ఏదైనా యంత్రం, అనగా అది స్వయంగా ప్రారంభమవుతుంది, దాని స్వంత పని మార్గాన్ని నిర్ణయిస్తుంది మరియు స్వంతంగా ఆగిపోతుంది. ఇది వాస్తవానికి మానవునికి ప్రతిరూపం, ఇది మానవ భారాన్ని తగ్గించడానికి రూపొందించబడింది. దీనిని వాయుపరంగా నియంత్రించవచ్చు లేదా హైడ్రాలిక్ మార్గాలను ఉపయోగించడం లేదా సాధారణ ఎలక్ట్రానిక్ నియంత్రణ మార్గాలను ఉపయోగించడం. మొదటి పారిశ్రామిక రోబోట్ 50 ల చివరలో మరియు 60 ల ప్రారంభంలో జార్జ్ డెవోల్ మరియు జో ఎంగెల్బెర్గర్ నిర్మించిన యూనిమేట్స్.
ఏదైనా రోబోట్ రష్యన్ సైన్స్ ఫిక్షన్ రచయిత ఐజాక్ అసిమోవ్ నిర్వచించిన 3 ప్రాథమిక చట్టాలపై నిర్మించబడింది:
- రోబోట్ మానవుడికి ప్రత్యక్షంగా లేదా పరోక్షంగా హాని కలిగించకూడదు.
- రోబోట్ మొదటి చట్టాన్ని ఉల్లంఘిస్తే తప్ప మానవ ఆదేశాలను పాటించాలి.
- 1 వ రెండు చట్టాలు ఉల్లంఘించకపోతే రోబోట్ తన ఉనికిని కాపాడుకోవాలి.

స్థిర రోబోట్
రోబోట్లు స్థిర రోబోలు లేదా మొబైల్ రోబోట్లు కావచ్చు. మొబైల్ రోబోట్లు మొబైల్ బేస్ కలిగిన రోబోట్లు, ఇవి రోబోట్ వాతావరణంలో స్వేచ్ఛగా కదులుతాయి. అధునాతన మొబైల్ రోబోట్లలో ఒకటి లైన్ ఫాలోయర్ రోబోట్. ఇది ప్రాథమికంగా ఒక రోబోట్, ఇది ఒక నిర్దిష్ట మార్గం లేదా పథాన్ని అనుసరిస్తుంది మరియు అడ్డంకితో సంకర్షణ చెందే దాని స్వంత చర్యను నిర్ణయిస్తుంది. మార్గం తెల్లటి అంతస్తులో (కనిపించే) లేదా అయస్కాంత క్షేత్రం (అదృశ్య) పై నల్ల రేఖ కావచ్చు. దీని అనువర్తనాలు ప్రాథమిక దేశీయ ఉపయోగాల నుండి పారిశ్రామిక ఉపయోగాలకు మొదలవుతాయి. పరిశ్రమలో ప్రస్తుత పరిస్థితి ఏమిటంటే వారు క్రేన్ వ్యవస్థను ఉపయోగించి పొట్లాలను లేదా వస్తువులను ఒక ప్రదేశానికి మరొక ప్రదేశానికి తీసుకువెళుతున్నారు. ఆ సమయంలో పెద్ద బరువులు ఎత్తడం కొన్ని సార్లు లిఫ్టింగ్ పదార్థాల విచ్ఛిన్నానికి కారణం కావచ్చు మరియు పొట్లాలను కూడా దెబ్బతీస్తుంది. షాపింగ్ మాల్స్, ఇళ్ళు, వినోద ప్రదేశాలు, పరిశ్రమల ద్వారా పిల్లలను తీసుకెళ్లడానికి రోబోలను అనుసరించే లైన్ సాధారణంగా ఉపయోగించబడుతుంది. లైన్ క్రింది ఉపయోగం రోబోటిక్ వాహనం పరిశ్రమలలో పదార్థాలను ఒక ప్రదేశం నుండి మరొక ప్రదేశానికి రవాణా చేయడం. ఈ రోబోట్ కదలిక పూర్తిగా ట్రాక్పై ఆధారపడి ఉంటుంది. రోబోట్ మీరు వాటిని ఏ పనినైనా చేయగలదు. కర్మాగారాల మాదిరిగానే వారు తమ ఉత్పత్తులను తయారు చేయాల్సిందల్లా రోబోను తయారు చేయడమే.

మొబైల్ రోబోట్
లైన్ అనుచరుడు రోబోట్
లైన్ ఫాలోయర్ రోబోట్ అనేది రోబోట్, ఇది ఫీడ్ బ్యాక్ మెకానిజం ద్వారా నియంత్రించబడే ఒక నిర్దిష్ట మార్గాన్ని అనుసరిస్తుంది.
ప్రాథమిక లైన్ అనుచరుడు రోబోట్ను నిర్మించడం:
ప్రాథమిక లైన్ అనుచరుడు రోబోట్ను నిర్మించడం క్రింది దశలను కలిగి ఉంటుంది.
- యాంత్రిక భాగాన్ని లేదా రోబోట్ యొక్క శరీరాన్ని రూపొందించడం
- రోబోట్ల యొక్క కైనమాటిక్స్ను నిర్వచించడం
- రోబోట్ నియంత్రణను రూపొందించడం

ఎ లైన్ ఫాలోయర్ రోబోట్
రోబోట్ యొక్క యాంత్రిక భాగం లేదా శరీరాన్ని ఆటోకాడ్ లేదా వర్క్స్పేస్ ఉపయోగించి రూపొందించవచ్చు. ఒక ప్రాథమిక లైన్ అనుచరుడు రోబోట్ చక్రాలు అమర్చబడిన రెండు చివర్లలో ఒక బేస్ కలిగి ఉంటుంది. హార్డ్ ప్లాస్టిక్ యొక్క దీర్ఘచతురస్రాకార షీట్ బేస్ గా ఉపయోగించవచ్చు. సిలిండర్ వంటి దృ body మైన శరీరాన్ని కీళ్ళతో ఒకదానితో ఒకటి అనుసంధానించబడిన ఇతర ఆకారపు శరీరాలతో పాటు, ప్రతి దాని దిశలో నిర్దిష్ట దిశలో చేర్చవచ్చు. లైన్ ఫాలోయర్ రోబోట్ ఒక స్థిర బేస్ కలిగిన చక్రాల మొబైల్ రోబోట్, కీళ్ళతో ఒకదానితో ఒకటి అనుసంధానించబడిన బహుళ దృ bodies మైన శరీరాలతో కాళ్ళ మొబైల్ రోబోట్.
తదుపరి దశలో రోబోట్ యొక్క కైనమాటిక్స్ను నిర్వచించడం ఉంటుంది. రోబోట్ యొక్క కైనమాటిక్ విశ్లేషణలో స్థిరమైన సమన్వయ వ్యవస్థకు సంబంధించి దాని కదలిక యొక్క వర్ణన ఉంటుంది. ఇది ప్రధానంగా రోబోట్ యొక్క కదలికతో మరియు కాళ్ళ రోబోట్ విషయంలో ప్రతి శరీరం యొక్క కదలికతో సంబంధం కలిగి ఉంటుంది. ఇది సాధారణంగా రోబోట్ మోషన్ యొక్క డైనమిక్స్ను కలిగి ఉంటుంది. రోబోట్ యొక్క మొత్తం పథం కైనెమాటిక్ విశ్లేషణను ఉపయోగించి సెట్ చేయబడింది. వర్క్స్పేస్ సాఫ్ట్వేర్ను ఉపయోగించి దీన్ని చేయవచ్చు.
రోబోట్ యొక్క నియంత్రణ దాని పనిలో చాలా ముఖ్యమైన అంశం. ఇక్కడ నియంత్రణ అనే పదం రోబోట్ మోషన్ కంట్రోల్ను సూచిస్తుంది, అనగా చక్రాల కదలికను నియంత్రించడం. ఒక ప్రాథమిక లైన్ అనుచరుడు రోబోట్ నిర్దిష్ట మార్గాన్ని అనుసరిస్తుంది మరియు ఈ మార్గంలో రోబోట్ యొక్క కదలిక చక్రాల భ్రమణాన్ని నియంత్రించడం ద్వారా నియంత్రించబడుతుంది, ఇవి రెండు మోటారుల షాఫ్ట్లపై ఉంచబడతాయి. కాబట్టి, మోటార్లు నియంత్రించడం ద్వారా ప్రాథమిక నియంత్రణ సాధించబడుతుంది. కంట్రోల్ సర్క్యూట్రీలో మార్గాన్ని గ్రహించడానికి సెన్సార్ల వాడకం ఉంటుంది మైక్రోకంట్రోలర్ లేదా సెన్సార్ అవుట్పుట్ ఆధారంగా మోటారు డ్రైవర్ల ద్వారా మోటారు ఆపరేషన్ను నియంత్రించడానికి ఏదైనా ఇతర పరికరం.
పంక్తిని నియంత్రించే 2 మార్గాలు అనుచరుడు రోబోట్
- మైక్రోకంట్రోలర్లను ఉపయోగించకుండా

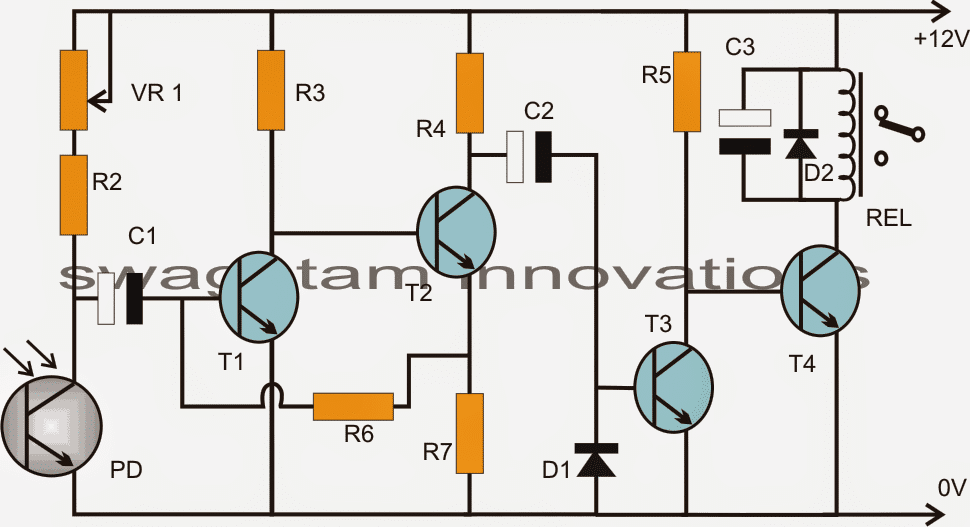
నియంత్రణ వ్యవస్థ యొక్క బ్లాక్ రేఖాచిత్రం
ఇది ప్రతి మోటారుకు IR-LED మరియు ఫోటోడియోడ్ అమరికను కలిగి ఉంటుంది, ఇది ట్రాన్సిస్టర్ ఆన్ మరియు ఆఫ్ చేయడం ద్వారా నియంత్రించబడుతుంది.
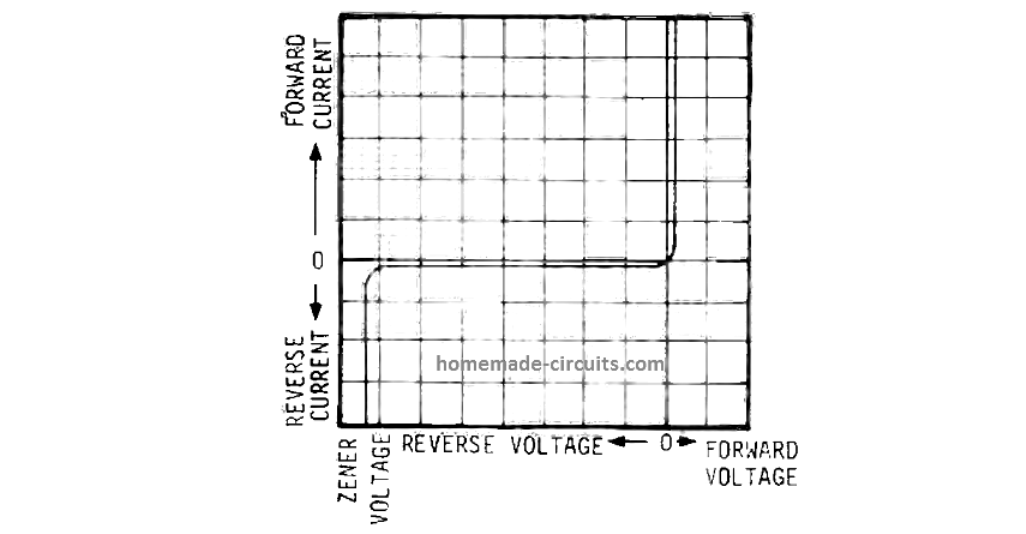
సరైన బయాసింగ్ పొందడంలో IR LED ఇన్ఫ్రా రెడ్ లైట్ ను విడుదల చేస్తుంది. ఈ IR కాంతి తెల్లటి ఉపరితలం విషయంలో ప్రతిబింబిస్తుంది మరియు ప్రతిబింబించే IR కాంతి ఫోటోడియోడ్లో జరిగిన సంఘటన. ఫోటోడియోడ్ యొక్క నిరోధకత తగ్గుతుంది, ఇది దాని ద్వారా విద్యుత్తు పెరుగుదలకు దారితీస్తుంది మరియు తద్వారా వోల్టేజ్ పడిపోతుంది. ఫోటోడియోడ్ ట్రాన్సిస్టర్ యొక్క స్థావరానికి అనుసంధానించబడి ఉంది మరియు ఫోటోడియోడ్ అంతటా పెరిగిన వోల్టేజ్ ఫలితంగా, ట్రాన్సిస్టర్ నిర్వహించడం ప్రారంభిస్తుంది మరియు తద్వారా ట్రాన్సిస్టర్ యొక్క కలెక్టర్కు అనుసంధానించబడిన మోటారు తిరగడం ప్రారంభించడానికి తగినంత సరఫరాను పొందుతుంది. సెన్సార్ అమరికలో ఒకటి ఎదుర్కొన్న మార్గంలో నల్ల రంగు విషయంలో, ఐఆర్ లైట్ ప్రతిబింబించదు మరియు ఫోటోడియోడ్ ఎక్కువ ప్రతిఘటనను అందిస్తుంది, దీని వలన ట్రాన్సిస్టర్ ప్రసరణను ఆపివేస్తుంది మరియు చివరికి మోటారు తిరగడం ఆగిపోతుంది.
అందువల్ల మొత్తం వ్యవస్థను సాధారణ LED- ఫోటోడియోడ్-ట్రాన్సిస్టర్ అమరిక ఉపయోగించి నియంత్రించవచ్చు.
- మైక్రోకంట్రోలర్లను ఉపయోగించడంతో
పని సూత్రం:
స్వీయ-ఆపరేటింగ్ రోబోట్లలో లైన్ ఫాలోయింగ్ రోబోట్ ఒకటి. అది ఆ ప్రాంతంపై గీసిన గీతను గుర్తించి ఫాలో చేస్తుంది. ఈ రేఖ బ్లాక్ ఉపరితలంపై తెల్లని గీత ద్వారా లేదా తెలుపు ఉపరితలంపై బ్లాక్ లైన్ ద్వారా సూచించబడుతుంది. ఈ వ్యవస్థ రేఖ ద్వారా అర్ధంగా ఉండాలి. ఈ అనువర్తనం సెన్సార్లపై ఆధారపడి ఉంటుంది. ఇక్కడ మేము మార్గం గుర్తించే ప్రయోజనం కోసం రెండు సెన్సార్లను ఉపయోగిస్తున్నాము. అంటే సాన్నిధ్య సెన్సార్ మరియు ఐఆర్ సెన్సార్. మార్గం గుర్తించడానికి ఉపయోగించే సామీప్య సెన్సార్ మరియు అడ్డంకిని గుర్తించడానికి ఉపయోగించే IR సెన్సార్. ఈ సెన్సార్లు రోబోట్ ముందు భాగంలో అమర్చబడి ఉంటాయి. మైక్రోకంట్రోలర్ ఒక తెలివైన పరికరం, మొత్తం సర్క్యూట్ మైక్రోకంట్రోలర్ చేత నియంత్రించబడుతుంది.

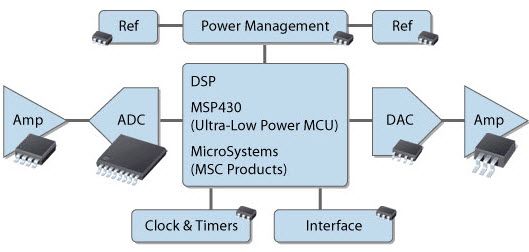
మైక్రోకంట్రోలర్తో రోబోటిక్ వాహనాన్ని అనుసరించే లైన్ యొక్క రేఖాచిత్రం
వివిధ రకాల లైన్ నియంత్రిత రోబోటిక్ వాహనాలు:
లైన్ కంట్రోల్డ్ రోబోటిక్ వాహనాలు రెండు రకాలు
- మొబైల్ ఆధారిత లైన్ నియంత్రిత రోబోటిక్ వాహనం
- RF ఆధారిత లైన్ నియంత్రిత రోబోటిక్ వాహనం
లైన్ అనుచరుడు రోబోట్ యొక్క అనువర్తనాలు:
- పారిశ్రామిక అనువర్తనాలు : ఈ కన్బోట్లను సాంప్రదాయ కన్వేయర్ బెల్ట్ల స్థానంలో పరిశ్రమలలో ఆటోమేటెడ్ ఎక్విప్మెంట్ క్యారియర్లుగా ఉపయోగించవచ్చు.
- ఆటోమొబైల్ అనువర్తనాలు : ఈ రోబోట్లను కూడా ఉపయోగించవచ్చు ఆటోమేటిక్ కార్లు ఎంబెడెడ్ అయస్కాంతాలతో రోడ్లపై నడుస్తుంది.
- దేశీయ అనువర్తనాలు : ఫ్లోర్ క్లీనింగ్ వంటి గృహ అవసరాల కోసం ఇళ్లలో కూడా వీటిని ఉపయోగించవచ్చు.
- మార్గదర్శక అనువర్తనాలు : మార్గ మార్గదర్శకత్వం అందించడానికి షాపింగ్ మాల్స్, మ్యూజియంలు వంటి బహిరంగ ప్రదేశాల్లో వీటిని ఉపయోగించవచ్చు.
ప్రయోజనాలు:
- రోబోట్ కదలిక స్వయంచాలకంగా ఉంటుంది
- ఇది సుదూర అనువర్తనాల కోసం ఉపయోగించబడుతుంది
- భవనం యొక్క సరళత
- వ్యవస్థను అమర్చండి మరియు మరచిపోండి
- ఇంట్లో వాడతారు, పారిశ్రామిక ఆటోమేషన్లు మొదలైనవి.