క్వాడ్కాప్టర్ రిమోట్ కంట్రోల్ సర్క్యూట్లను మార్కెట్ నుండి లేదా ఏదైనా ఆన్లైన్ స్టోర్ నుండి చాలా తేలికగా సేకరించగలిగినప్పటికీ, ఆసక్తిగల ఎలక్ట్రానిక్ అభిరుచి గలవారు ఈ ఫంక్షన్ ఎలా వాస్తవంగా నేర్చుకోవాలో మరియు ఇంట్లో వీటిని నిర్మించవచ్చో లేదో తెలుసుకోవడానికి ఎప్పుడూ అనుమతించబడరు?
ఈ వ్యాసంలో మనం నిర్మించడానికి ప్రయత్నిస్తాము సాధారణ క్వాడ్కాప్టర్ రిమోట్ కంట్రోల్ సర్క్యూట్ వివిక్త భాగాలను ఉపయోగించడం మరియు RF రిమోట్ కంట్రోల్ మాడ్యూళ్ళను ఉపయోగించడం మరియు సంక్లిష్టమైన MCU ఆధారిత సర్క్యూట్లను కలిగి లేకుండా.
స్టెప్ బై స్టెప్ వాస్తవానికి ఆసక్తిగల అభిరుచి గలవారికి పిడబ్ల్యుఎం భావనను ఉపయోగించి క్వాడ్కాప్టర్ను ఎంతవరకు నియంత్రించవచ్చో అర్థం చేసుకుంటుంది.
మేము ఇప్పటికే నేర్చుకున్నాము క్వాడ్కాప్టర్ బేసిక్స్ , ఇప్పుడు రిమోట్ కంట్రోల్ విభాగాన్ని పరిశీలిద్దాం, ఇది చివరకు యూనిట్ను రిమోట్గా ఎగరడానికి సహాయపడుతుంది.
ప్రాథమిక గుణకాలు అవసరం
ప్రాజెక్ట్ కోసం అవసరమైన ప్రధాన పదార్థాలు క్రింద ఇవ్వబడ్డాయి:
మాకు ప్రాథమికంగా ఈ క్రింది 3 సర్క్యూట్ దశలు అవసరం:
1) 4 వే RF రిమోట్ కంట్రోల్ Tx, Rx గుణకాలు - 1 సెట్
2) ఐసి 555 ఆధారిత పిడబ్ల్యుఎం జనరేటర్ సర్క్యూట్లు - 4 నోస్
3) బిఎల్డిసి మోటార్ కంట్రోలర్ సర్క్యూట్లు - 4 నోస్
ఇది ఇంట్లో తయారుచేసిన సంస్కరణ కాబట్టి, ప్రతిపాదిత రూపకల్పనలో కొన్ని అసమర్థతలను మేము ఆశించవచ్చు, నియంత్రణల కోసం జాయ్స్టిక్లు లేకపోవడం, వీటిని కుండలు లేదా పొటెన్షియోమీటర్లతో భర్తీ చేస్తారు, అయినప్పటికీ వ్యవస్థ యొక్క పని సామర్ధ్యం సమానంగా ఉంటుందని ఆశించవచ్చు ప్రొఫెషనల్ యూనిట్లు.
హ్యాండ్హెల్డ్ పిడబ్ల్యుఎం ట్రాన్స్మిటర్ యూనిట్ ప్రాథమికంగా 4 వివిక్త పిడబ్ల్యుఎం కంట్రోల్ సర్క్యూట్లతో అనుసంధానించబడిన టిఎక్స్ రిమోట్ మాడ్యూల్ను కలిగి ఉంటుంది, అయితే క్వాడ్కాప్టర్ను 1 వివిక్త బిఎల్డిసి డ్రైవర్ సర్క్యూట్లతో అనుసంధానించబడిన 1 ఆర్ఎక్స్ సర్క్యూట్తో జతచేయాలి.
క్వాడ్కాప్టర్ మోటారు సర్క్యూట్లతో ప్రారంభిద్దాం మరియు BLDC మోటారు కంట్రోలర్ను Rx సర్క్యూట్తో ఎలా కాన్ఫిగర్ చేయాలి మరియు జతచేయాలి అని చూద్దాం.
క్వాడ్కాప్టర్ పిడబ్ల్యుఎం రిసీవర్ సర్క్యూట్
మునుపటి పోస్ట్లలో ఒకదానిలో సింగిల్ చిప్ను ఉపయోగించి బహుముఖ BLDC మోటారు కంట్రోలర్ను ఎలా నిర్మించవచ్చో తెలుసుకున్నాము, అయితే ఈ డిజైన్ క్వాడ్కాప్టర్ యొక్క సాపేక్షంగా భారీ మోటారులను ఆపరేట్ చేయడానికి రూపొందించబడలేదు, కాబట్టి ఇది ప్రస్తుత అనువర్తనానికి తగినది కాకపోవచ్చు.
పై సర్క్యూట్ కోసం 'బిగ్ బ్రదర్' ఎంపిక అదృష్టవశాత్తూ అందుబాటులో ఉంది మరియు క్వాడ్కాప్టర్ మోటార్లు నడపడానికి ఖచ్చితంగా సరిపోతుంది. అటువంటి అద్భుతమైన సింగిల్ చిప్ అప్లికేషన్ పేర్కొన్న సర్క్యూట్ మాడ్యూళ్ళను మాకు అందించినందుకు టెక్సాస్ సూచనలకు ధన్యవాదాలు.
ఈ అధిక ప్రస్తుత BLDC డ్రైవర్ IC గురించి మరింత తెలుసుకోవడానికి, మీరు ఈ క్రింది పిడిఎఫ్ డేటాషీట్ను సూచించవచ్చు
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
దిగువ అమర్చబడినది DRV11873 IC ని ఉపయోగించి క్వాడ్కాప్టర్ మోటారు డ్రైవర్ కంట్రోలర్ యొక్క పూర్తి సర్క్యూట్ స్కీమాటిక్ను చూపిస్తుంది, ఇది స్వయంచాలకంగా తక్కువ ప్రస్తుత BLDC మోటారు సర్క్యూట్, ఓవర్లోడ్ రక్షణ, ఉష్ణ రక్షణ మొదలైన అన్ని అవసరమైన రక్షణ లక్షణాలను కలిగి ఉంటుంది. ఈ మాడ్యూల్ ప్రాథమికంగా ESC ని ఏర్పరుస్తుంది మా ప్రస్తుత క్వాడ్కాప్టర్ యూనిట్ కోసం.
ఈ డిజైన్ మరియు పిసిబి వివరాలపై మరింత సమాచారం కోసం, మీరు క్రింద ఉన్న అసలు పత్రాన్ని చూడవచ్చు:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

అది ఎలా పని చేస్తుంది
IC యొక్క FS మరియు FG పిన్అవుట్లు బాహ్య సర్క్యూట్ల ద్వారా అదనపు నియంత్రణలతో IC ని మెరుగుపరచడం, ఎందుకంటే మేము ఈ లక్షణాలను మా డిజైన్లో ఉపయోగించడం లేదు కాబట్టి, ఈ పిన్లను ఉపయోగించకుండా ఉంచవచ్చు మరియు 100K రెసిస్టర్ ద్వారా సానుకూల రేఖకు ముగించవచ్చు.
IC యొక్క RD పిన్అవుట్ మోటారు యొక్క భ్రమణ దిశను నిర్ణయిస్తుంది. 100K రెసిస్టర్ ద్వారా ఈ పిన్ను Vcc కి కనెక్ట్ చేయడం వలన మోటారుపై యాంటిక్లాక్వైస్ భ్రమణం అనుమతిస్తుంది, దానిని అనుసంధానించకుండా వదిలేయడం విరుద్ధంగా చేస్తుంది మరియు మోటారును సవ్యదిశలో తిప్పడానికి అనుమతిస్తుంది.
పిన్ # 16 అనేది PWM ఇన్పుట్ బాహ్య మూలం నుండి PWM ఇన్పుట్ను ఇంజెక్ట్ చేయడానికి ఉపయోగించబడుతుంది, PWM యొక్క విధి చక్రం మారుతూ మోటారు వేగాన్ని తదనుగుణంగా మారుస్తుంది.
ఎఫ్ఆర్, సిఎస్ పిన్అవుట్లు కూడా అవసరానికి అసంబద్ధం మరియు అందువల్ల రేఖాచిత్రంలో చూపిన విధంగా ఉపయోగించబడకుండా వదిలివేయవచ్చు మరియు 100 కె రెసిస్టర్ ద్వారా సానుకూల రేఖకు ముగించబడుతుంది.
U, V, W పిన్అవుట్లు మోటారు అవుట్పుట్లు, వీటిని సంబంధిత క్వాడ్కాప్టర్ BLDC 3 ఫేజ్ మోటారుతో అనుసంధానించాలి.
COM పిన్అవుట్ 3 ఫేజ్ మోటారు యొక్క సాధారణ వైర్ను కనెక్ట్ చేయడం కోసం, మీ మోటారుకు సాధారణ వైర్ లేకపోతే, మీరు 2k2 రెసిస్టర్ల యొక్క 3 సంఖ్యలను U, W, W పిన్లకు కనెక్ట్ చేయడం ద్వారా దాన్ని అనుకరించవచ్చు మరియు తరువాత వాటి సాధారణంలో చేరవచ్చు IC యొక్క COM పిన్తో ముగుస్తుంది.
స్కీమాటిక్ PWM అస్టేబుల్ సర్క్యూట్ మోడ్లో కాన్ఫిగర్ చేయబడిన IC 555 ను కూడా చూపిస్తుంది. ఇది సర్క్యూట్ మాడ్యూల్లో ఒక భాగం అవుతుంది మరియు దాని పిన్ # 7 నుండి PWM అవుట్పుట్ DRV IC సర్క్యూట్ యొక్క PWM ఇన్పుట్తో అనుసంధానించబడి 4 మోటార్లు స్థిరమైన బేస్ వేగంతో ప్రారంభించడానికి మరియు మోటారును స్థిరంగా కదిలించడానికి వీలు కల్పిస్తుంది. ఇచ్చిన ప్రదేశంలో వేగం.
ఇది క్వాడ్కాప్టర్ డిజైన్ కోసం ప్రధాన ELC సర్క్యూట్ లేదా BLDC డ్రైవర్ సర్క్యూట్ను ముగించింది.
మా క్వాడ్కాప్టర్ డిజైన్లో నాలుగు మోటారులకు ఇలాంటి నాలుగు మాడ్యూల్స్ అవసరం.
అర్థం, ఐసి 555 పిడబ్ల్యుఎం దశతో పాటు ఇటువంటి 4 డిఆర్వి ఐసిలను క్వాడ్కాప్టర్ యొక్క ప్రతి 4 మోటారులతో అనుబంధించాల్సి ఉంటుంది.
ఈ మాడ్యూల్స్ సాధారణంగా అన్ని 4 మోటార్లు నిర్ణీత మరియు ఒకేలాంటి పిడబ్ల్యుఎం సిగ్నల్ను సంబంధిత డిఆర్వి కంట్రోలర్ ఐసిలకు వర్తింపజేయడం ద్వారా ముందుగా నిర్ణయించిన వేగంతో అమర్చబడిందని నిర్ధారిస్తుంది.
సాధారణ 4 ఛానల్ రిమోట్ కంట్రోల్ హ్యాండ్సెట్ను ఉపయోగించి వ్యక్తిగత మోటారు వేగాన్ని మార్చడానికి రిమోట్ కంట్రోల్ ద్వారా PWM ఎలా మార్చవచ్చో ఇప్పుడు తెలుసుకుందాం.
RF రిసీవర్ మాడ్యూల్ (PWM డీకోడర్)

పై సర్క్యూట్ రిసీవర్ రిమోట్ RF సర్క్యూట్ను చూపిస్తుంది, ఇది వినియోగదారు యొక్క రిమోట్ ట్రాన్స్మిటర్ హ్యాండ్సెట్ నుండి బాహ్య వైర్లెస్ PWM డేటాను స్వీకరించడానికి క్వాడ్కాప్టర్ లోపల ఉంచవలసి ఉంటుంది మరియు తరువాత వివరించిన విధంగా DRV కంట్రోలర్ మాడ్యూళ్ళను పోషించడానికి తగిన విధంగా సిగ్నల్లను ప్రాసెస్ చేస్తుంది. మునుపటి విభాగం.
PWM # 1… .PWM # 4 అని పిలువబడే 4 అవుట్పుట్లను మునుపటి రేఖాచిత్రంలో సూచించిన విధంగా DRV IC యొక్క PWM పిన్ # 15 తో కనెక్ట్ చేయాలి.
RF రిసీవర్ యూనిట్ నుండి ఈ PWM పిన్అవుట్లు దాని ట్రాన్స్మిటర్ హ్యాండ్సెట్లోని వినియోగదారు సంబంధిత బటన్ను నొక్కినప్పుడల్లా సక్రియం అవుతుంది.
RF ట్రాన్స్మిటర్ వైర్డ్ ఎలా ఉండాలి (PWM ఎన్కోడర్)
పై విభాగంలో మేము Rx లేదా రిమోట్ రిసీవర్ సర్క్యూట్ గురించి చర్చించాము మరియు దాని 4 అవుట్పుట్లను క్వాడ్కాప్టర్ మోటారు ESC డ్రైవర్ మాడ్యూళ్ళతో ఎలా కనెక్ట్ చేయాలి.
క్వాడ్కాప్టర్ రిసీవర్ యూనిట్కు పిడబ్ల్యుఎం డేటాను వైర్లెస్గా ప్రసారం చేయడానికి సాధారణ ఆర్ఎఫ్ ట్రాన్స్మిటర్ను పిడబ్ల్యుఎం సర్క్యూట్లతో ఎలా సృష్టించాలి మరియు వైర్ చేయాలి అని ఇక్కడ మనం చూస్తాము, తద్వారా వ్యక్తిగత మోటారు వేగం కేవలం ఒక బటన్ ప్రెస్తో నియంత్రించబడుతుంది, ఇది చివరికి కారణమవుతుంది వినియోగదారుల ప్రాధాన్యతల ప్రకారం దిశ లేదా దాని వేగాన్ని మార్చడానికి క్వాడ్కాప్టర్.

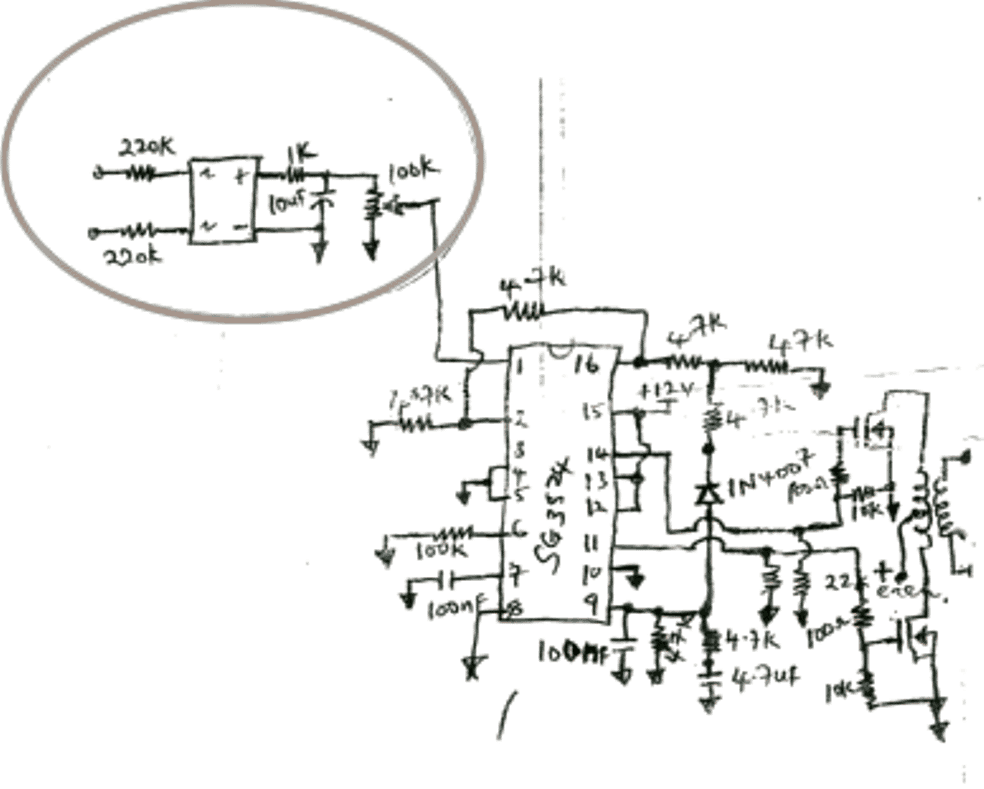
పైన చూపిన సర్క్యూట్ ట్రాన్స్మిటర్ మాడ్యూల్ యొక్క వైరింగ్ వివరాలను ప్రదర్శిస్తుంది. ఆలోచన చాలా సరళంగా కనిపిస్తుంది, ప్రధాన ట్రాన్స్మిటర్ సర్క్యూట్ TSW434 చిప్ ద్వారా ఏర్పడుతుంది, ఇది ఎన్కోడ్ చేసిన PWM సిగ్నల్స్ వాతావరణంలోకి ప్రసారం చేస్తుంది మరియు TSW చిప్కు ఎన్కోడ్ చేసిన సిగ్నల్లను పోషించడానికి బాధ్యత వహించే HT12E.
PWM సిగ్నల్స్ 4 వేర్వేరు IC 555 సర్క్యూట్ దశల ద్వారా ఉత్పత్తి చేయబడతాయి, ఇవి DRV కంట్రోలర్ మాడ్యూల్లో ఇంతకుముందు చర్చించిన వాటికి సమానంగా ఉండవచ్చు.
SW1 ---- SW4 గా సూచించబడిన 4 వివిక్త పుష్ బటన్ల ద్వారా 4 IC ల యొక్క PWM విషయాలు ఎన్కోడర్ IC HT12E యొక్క సంబంధిత పిన్అవుట్లకు ముగించబడతాయి.
ఈ బటన్లు ప్రతి ఒక్కటి రిసీవర్ మాడ్యూల్ యొక్క సారూప్య పిన్అవుట్ను మేము ఇంతకుముందు చర్చించాము మరియు PWM # 1, PWM # 2… ..PWM # 4 గా సూచించాము.
SW1 నొక్కడం అంటే రిసీవర్ యూనిట్ యొక్క PWM # 1 అవుట్పుట్ క్రియాశీలంగా ఉంటుంది మరియు ఇది పిన్అవుట్ ట్రాన్స్మిటర్ నుండి అనుబంధ DRV మాడ్యూల్కు అందుకున్న డీకోడ్ చేసిన PWM సిగ్నల్లను తినిపించడం ప్రారంభిస్తుంది మరియు సంబంధిత మోటారు దాని వేగాన్ని తదనుగుణంగా మార్చడానికి కారణమవుతుంది.
అదేవిధంగా, SW2,3,4 నొక్కడం వినియోగదారుల కోరిక ప్రకారం ఇతర 3 క్వాడ్కాప్టర్ మోటారుల వేగాన్ని ప్రభావితం చేయడానికి ఉపయోగించవచ్చు.
IC 555 PWM సర్క్యూట్
పై RF ట్రాన్స్మిటర్ హ్యాండ్సెట్లో చూపిన 4 PWM సర్క్యూట్లను ఈ క్రింది రేఖాచిత్రాన్ని సూచించడం ద్వారా నిర్మించవచ్చు, ఇది మా DRV కంట్రోలర్ ESC సర్క్యూట్ను చూసిన మాదిరిగానే ఉంటుంది.

దయచేసి 5 కె పాట్ ఒక సాధారణ కుండ రూపంలో ఉండవచ్చని గుర్తుంచుకోండి మరియు ఈ కుండను సంబంధిత మోటారులలో వేర్వేరు వేగాలను ఎంచుకోవడానికి బటన్లతో అదనంగా ఉపయోగించవచ్చు.
ఎంచుకున్న బటన్ను నొక్కి ఉంచడం ద్వారా మరియు సంబంధిత 5KPWMpot ను ఒకేసారి కదిలించడం ద్వారా అర్థం క్వాడ్కాప్టర్ ఉద్దేశించిన దిశలో దాని వేగాన్ని పెంచడానికి లేదా తగ్గించడానికి కారణమవుతుంది.
ప్రత్యామ్నాయంగా PWM ను మొదట కొంత ఎక్కువ లేదా తక్కువ స్థాయిలో అమర్చవచ్చు మరియు PWM సెట్టింగ్ ప్రకారం సంబంధిత క్వాడ్కాప్టర్ మోటారును ఇష్టపడే వేగాన్ని సాధించడానికి సంబంధిత బటన్ను నొక్కండి.
క్వాడ్కాప్టర్ మోటార్ స్పెసిఫికేషన్
పైన వివరించిన క్వియాడ్కాప్టర్ రిమోట్ కంట్రోల్ సర్క్యూట్ ప్రదర్శన ప్రయోజనం కోసం మాత్రమే ఉపయోగించబడుతుంది మరియు లోడ్లు లేదా కెమెరాను ఎత్తడానికి ఉపయోగించబడదు. డిజైన్లో ఉపయోగించిన మోటార్లు తక్కువ ప్రస్తుత రకంగా ఉండాలని ఇది సూచిస్తుంది.
DRV11873 IC 15V, 1.5 ఆంప్స్ లేదా 20 వాట్ల మోటారుతో రేట్ చేయబడిన మోటారులను ఆపరేట్ చేయడానికి రూపొందించబడింది ... కాబట్టి 15 నుండి 30 వాట్ల వద్ద రేట్ చేయబడిన 3 దశల BLDC మోటారును ఈ ప్రయోజనం కోసం ఉపయోగించవచ్చు.
ఈ క్వాడ్కాప్టర్ డిజైన్ కోసం బ్యాటరీ ఏదైనా 12v లిపో ప్రి లి-అయాన్ బ్యాటరీ కావచ్చు, 15 వి శిఖరాన్ని 1.5 ఆంప్స్ నిరంతర కరెంట్ వద్ద సరఫరా చేయగలదు.
స్పెసిఫికేషన్ వివరాలు
1306 ఎన్ బ్రష్లెస్ అవుట్రన్నర్ మినియేచర్ డిసి మోటార్
రకం: మైక్రో మోటార్
నిర్మాణం: శాశ్వత అయస్కాంతం
మార్పిడి: బ్రష్లెస్
వేగం (RPM): 2200rpm / v
నిరంతర కరెంట్ (ఎ): 1.5 ~ 2.6 ఎ
వోల్టేజ్ (వి): 7.4 ~ 11.1 వి
సూక్ష్మ dc మోటారు: AX-1306N
బరువు: 8 గ్రా
షాఫ్ట్ యొక్క వ్యాసం: 1.5 మిమీ
బ్యాటరీ LI-PO: 2-3 సె
ఆపరేటింగ్ కరెంట్: 1.5 ~ 2.6A
గరిష్ట సామర్థ్యం: 67%

మునుపటి: సెన్సార్లెస్ BLDC మోటార్ డ్రైవర్ సర్క్యూట్ తర్వాత: పుష్-బటన్లను ఉపయోగించి హీటర్ కంట్రోలర్ సర్క్యూట్