సర్వో మోటార్లు స్వీయ-నియంత్రణ యాంత్రిక పరికరాలు, ఇవి యంత్రాలను గొప్ప ఖచ్చితత్వంతో నియంత్రించడానికి ఉపయోగిస్తారు. బొమ్మల నుండి పారిశ్రామిక ఆటోమేషన్ వరకు అనేక అనువర్తనాల్లో ఇవి కనిపిస్తాయి. వివిధ రకాలైన మోటారు ఉంది, కాని సర్వో మోటార్లు యంత్రాలను నియంత్రించడానికి నిర్దిష్ట కోణీయ స్థానం కోసం ప్రత్యేకంగా రూపొందించబడ్డాయి. సాధారణంగా సర్వో మోటారును 0 from నుండి 180 ° మరియు 0 ° నుండి 90 between మధ్య కోణీయ కదలికను నియంత్రించడానికి ఉపయోగిస్తారు. ది సర్వో మోటార్ పని సూత్రం PWM ఆధారంగా ( పల్స్ వెడల్పు మాడ్యులేషన్ ) పప్పులు.

సర్వో మోటర్
8051 మైక్రోకంట్రోలర్తో సర్వో మోటార్ ఇంటర్ఫేసింగ్
ఖచ్చితమైన కోణీయ కదలిక కోసం సర్వో మోటారు సాధారణంగా ఉపయోగించే మోటారు. సర్వో మోటారును ఉపయోగించడం వల్ల కలిగే ప్రయోజనం ఏమిటంటే, మోటారు యొక్క కోణీయ స్థానాన్ని ఎటువంటి అభిప్రాయ విధానం లేకుండా నియంత్రించవచ్చు. సర్వో మోటార్లు సాధారణంగా ఉపయోగించబడతాయి వాణిజ్య మరియు పారిశ్రామిక అనువర్తనాలు . రోబోట్లు, విమానాలు మొదలైన డ్రైవ్ సిస్టమ్స్లో కూడా వీటిని విస్తృతంగా ఉపయోగిస్తున్నారు.

8051 మైక్రోకంట్రోలర్తో ఇంటర్ఫేసింగ్ సర్వో మోటార్
అభిరుచి గల సర్వో మోటారు పని సూత్రం మరియు ఆపరేషన్ చాలా సులభం, ఇది మూడు వైర్లను కలిగి ఉంది, ఇక్కడ వాటిలో రెండు (నలుపు మరియు ఎరుపు) శక్తిని అందించడానికి ఉపయోగించబడతాయి మరియు మూడవ తీగ నియంత్రణ సిగ్నల్ అందించడానికి ఉపయోగించబడుతుంది. పల్స్ వెడల్పు మాడ్యులేటెడ్ (పిడబ్ల్యుఎం) తరంగాలను నియంత్రణ సంకేతాలుగా ఉపయోగిస్తారు మరియు నియంత్రణ ఇన్పుట్ వద్ద పల్స్ యొక్క వెడల్పు ద్వారా కోణీయ స్థానం ఖచ్చితమైనది. ఈ వ్యాసంలో, మేము 0-180 from నుండి భ్రమణ కోణాన్ని కలిగి ఉన్న సర్వో మోటారును ఉపయోగిస్తున్నాము మరియు 1ms నుండి 2ms మధ్య విధి చక్రాలను మార్చడం ద్వారా కోణీయ స్థానాన్ని నియంత్రించవచ్చు.
ఇక్కడ సర్వో మోటార్ ఇంటర్ఫేసింగ్ 8051 మైక్రోకంట్రోలర్ , గ్రౌండ్ పిన్కు అనుసంధానించబడిన బ్లాక్ వైర్ మరియు మోటారు ఎరుపు తీగ నుండి శక్తిని పొందుతాయి. 8051 మైక్రోకంట్రోలర్ యొక్క సర్వో మోటార్ కనెక్ట్ పోర్ట్ 0 యొక్క నియంత్రణ. 11.0592MHz క్రిస్టల్ ఓసిలేటర్ మైక్రోకంట్రోలర్కు పల్సెడ్ గడియారాన్ని అందించడానికి మరియు క్రిస్టల్ యొక్క ఆపరేషన్ను స్థిరీకరించడానికి ఉపయోగించే 22 పిఎఫ్ సిరామిక్ కెపాసిటర్లను ఉపయోగిస్తారు. మైక్రోకంట్రోలర్కు రీసెట్ చేసే శక్తిని అందించడానికి 10KΩ మరియు 10uf కెపాసిటర్ ఉపయోగించబడుతుంది.
యాంగిల్ భ్రమణాలతో సర్వో మోటారును నియంత్రించడం
సర్వో మోటార్ పని సూత్రం ప్రధానంగా విధి చక్రాలపై ఆధారపడి ఉంటుంది. ఇది పల్స్ వెడల్పు మాడ్యులేటెడ్ (పిడబ్ల్యుఎం) తరంగాలను నియంత్రణ సంకేతాలుగా ఉపయోగిస్తుంది. భ్రమణ కోణం కంట్రోల్ పిన్ యొక్క పల్స్ వెడల్పు ద్వారా పరిష్కరించబడుతుంది. ఇక్కడ 0 నుండి 180 డిగ్రీల వరకు భ్రమణ కోణానికి ఉపయోగించే సర్వో మోటార్. 1ms నుండి 2ms మధ్య పల్స్ను మార్చడం ద్వారా మేము ఖచ్చితమైన కోణీయ స్థానాన్ని నియంత్రించవచ్చు.

యాంగిల్ రొటేషన్స్తో సర్వో మోటారును నియంత్రించడం
కోణీయ భ్రమణాలతో సర్వో మోటార్ ప్రోగ్రామింగ్
# చేర్చండి
Sbit servomotor_pin = P0 ^ 5
రద్దు ఆలస్యం (సంతకం చేయని పూర్ణాంకానికి)
సర్వో_డేను రద్దు చేయండి (సంతకం చేయని పూర్ణాంకం)
శూన్యం ప్రధాన ()
{
సర్వోమోటర్_పిన్ = 0x00
చేయండి
{
// 0 to కు తిరగండి
సర్వోమోటర్_పిన్ = 0x01
సెవో_డిలే (50)
సర్వోమోటర్_పిన్ = 0x00
ఆలస్యం (1000)
// 90 డిగ్రీలకు తిరగండి
సర్వోమోటర్_పిన్ = 0x01
సెవో_డిలే (82)
సర్వోమోటర్_పిన్ = 0x00
ఆలస్యం (1000)
// 180 డిగ్రీలకు తిరగండి
సర్వోమోటర్_పిన్ = 0x01
సెవో_డిలే (110)
సర్వోమోటర్_పిన్ = 0x00
ఆలస్యం (1000)
ఉండగా (1)
}
}
ఆలస్యం ఆలస్యం (సంతకం చేయని పూర్ణాంకం a)
{
సంతకం చేయని పూర్ణాంకం p
కోసం (p = 0p
}
సర్వో_డేను రద్దు చేయండి (సంతకం చేయని పూర్ణాంకం)
{
సంతకం చేయని పూర్ణాంకం p
కోసం (p = 0p
}
సర్వో మోటార్ వర్కింగ్ సూత్రం
సర్వో మోటారు పని సూత్రం ప్రధానంగా ‘ఫ్లెమింగ్ లెఫ్ట్ హ్యాండ్ రూల్’ పై ఆధారపడి ఉంటుంది. ప్రాథమికంగా సర్వో మోటార్లు అనుగుణంగా ఉంటాయి DC మోటార్లు , స్థానం సెన్సార్, గేర్ తగ్గింపు మరియు ఎలక్ట్రానిక్ సర్క్యూట్. DC మోటార్లు బ్యాటరీ నుండి శక్తిని సాధిస్తాయి మరియు అధిక వేగం మరియు తక్కువ టార్క్ వద్ద నడుస్తాయి. మేము DC మోటారులకు అనుసంధానించబడిన షాఫ్ట్ మరియు గేర్లను సమీకరించాము, అప్పుడు మేము మోటారు వేగాన్ని క్రమంగా పెంచవచ్చు మరియు తగ్గించవచ్చు.
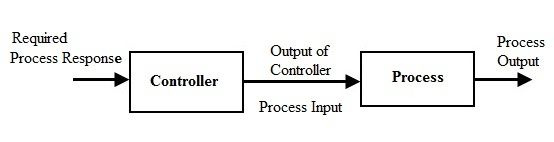
స్థానం సెన్సార్ దాని స్థిర స్థానం నుండి షాఫ్ట్ యొక్క స్థానాన్ని గ్రహించి సమాచారాన్ని కంట్రోల్ సర్క్యూట్కు పంపుతుంది. కంట్రోల్ సర్క్యూట్ స్థానం సెన్సార్ నుండి సంకేతాలను డీకోడ్ చేస్తుంది మరియు మోటారుల యొక్క వాస్తవ స్థానాన్ని ఇష్టపడే స్థానంతో పోలుస్తుంది మరియు తదనుగుణంగా అవసరమైన స్థానాన్ని పొందడానికి DC మోటారు యొక్క భ్రమణ దిశను నియంత్రిస్తుంది. సాధారణంగా సర్వో మోటారుకు 4.8V నుండి 6 V DC సరఫరా అవసరం.
సీరియల్ పోర్ట్ ఆదేశాల ద్వారా సర్వో మోటార్ కంట్రోలింగ్
ఈ ప్రాజెక్ట్ యొక్క ముఖ్య ఉద్దేశ్యం వ్యక్తిగత కంప్యూటర్ను ఉపయోగించడం ద్వారా సర్వో మోటారును నియంత్రించడం. సర్క్యూట్కు ఆదేశాలను పంపడానికి మైక్రోకంట్రోలర్ మరియు సీరియల్ ఇన్పుట్ లైన్ నుండి, వ్యక్తిగత కంప్యూటర్ సీరియల్ పోర్ట్ నుండి ఒకే నియంత్రణ లైన్ అవసరం. టైమింగ్ సోర్స్ క్రిస్టల్ ఓసిలేటర్ ద్వారా అందించబడుతుంది. సీరియల్ కేబుల్ మరియు లెవల్ షిఫ్టర్ సహాయంతో కంప్యూటర్కు ఇంటర్ఫేస్ చేసిన సర్వో మోటార్ సర్క్యూట్ కంప్యూటర్ యొక్క కంపార్ట్ను ఎంచుకోవడానికి పిసిలో ‘హైపర్ టెర్మినల్’ సాఫ్ట్వేర్ను తెరవండి.

సీరియల్ పోర్ట్ ఆదేశాల ద్వారా సర్వో మోటార్ కంట్రోలింగ్
లెవల్ షిఫ్టర్తో హైపర్ టెర్మినల్ ద్వారా వ్యక్తిగత కంప్యూటర్ (పిసి) నుండి మైక్రోకంట్రోలర్కు ఆదేశాలను పంపిన తర్వాత, మైక్రోకంట్రోలర్ ఈ డేటాను పొందుతుంది మరియు వాటిని ముందే నిర్వచించిన డేటాతో పోల్చి, మోటారు డ్రైవర్ను సక్రియం చేయడానికి సంబంధిత సిగ్నల్లను ఉత్పత్తి చేస్తుంది. కావలసిన వేగం. చాలా మైక్రోకంట్రోలర్ ప్రాజెక్టులు బ్యాలెన్సింగ్ రోబోట్లు, రన్వే హెలికాప్టర్లు వంటి సర్వో మోటారు ఆధారంగా అభివృద్ధి చేయబడింది. కెమెరా 360 డైగ్రెస్ను నియంత్రించగలిగేటప్పుడు వైర్లెస్ కెమెరాతో ఇంటర్ఫేస్ చేయడం ద్వారా భద్రతా ప్రయోజనం కోసం మేము సర్వో మోటారును ఉపయోగించవచ్చు.
సెల్ఫ్ బ్యాలెన్సింగ్ రోబోట్
సెల్ఫ్ బ్యాలెన్సింగ్ రోబోట్ సర్వో మోటారుల సహాయంతో తనను తాను సమతుల్యం చేసుకోగలదు. ఈ రోబోట్ నిర్మాణాత్మక, యాంత్రిక మరియు ఎలక్ట్రానిక్ భాగాలతో ఉపయోగించి సమావేశమైంది, ఇది దృశ్యమానంగా అసమతుల్యమైన ప్లాట్ఫామ్ను ఉత్పత్తి చేస్తుంది, ఇది ఒక అమరికలో చిట్కా చేయడానికి అధికంగా పారవేయబడుతుంది. రోబోట్ యొక్క చక్రాలు రెండు విధాలుగా స్వతంత్ర భ్రమణ సామర్థ్యాన్ని కలిగి ఉంటాయి, ఇవి సర్వో మోటారు ద్వారా నడపబడతాయి. భూమికి సంబంధించి పరికరం యొక్క కోణం గురించి సమాచారం పొందబడుతుంది వంపు సెన్సార్లు పరికరంలో.

సెల్ఫ్ బ్యాలెన్సింగ్ రోబోట్
వంపు సెన్సార్ యాక్సిలెరోమీటర్, గైరోస్కోపిక్ సెన్సార్ లేదా కావచ్చు IR సెన్సార్ (భూమికి దూర కొలతకు). సెన్సార్లు నియంత్రణ యూనిట్కు సమాచారాన్ని పంపుతాయి, ఇది పరికరాన్ని సమతుల్యం చేయడానికి సర్వో మోటారులకు పరిహార స్థాన నియంత్రణ సంకేతాలను ఉత్పత్తి చేయడానికి ప్రాథమిక అనుపాత, సమగ్ర, ఉత్పన్న (పిఐడి) అల్గోరిథం ఉపయోగించి అభిప్రాయాన్ని ప్రాసెస్ చేస్తుంది.
సర్వో మోటార్ అప్లికేషన్స్
- ముక్కలను పరిమాణానికి కత్తిరించడానికి ఇది ప్రెస్ మెషీన్లలో ఉపయోగించబడుతుంది
- ఇది షుగర్ ఫిల్లింగ్ స్టేషన్లో ఉపయోగించబడుతుంది
- ఇది లేబులింగ్ అనువర్తనాలలో ఉపయోగించబడుతుంది
- ఇది యాదృచ్ఛిక టైమింగ్ ఫంక్షన్తో ప్యాకింగ్ సిస్టమ్ను ఉపయోగిస్తారు
- ఇది విమానాలలో ఉపయోగించబడుతుంది
సర్వో మోటార్ యొక్క ప్రయోజనాలు
- మోటారుకు భారీ భారం వస్తే, మోటారును తిప్పడానికి దాని ప్రయత్నాల వలె డ్రైవర్ మోటారు కాయిల్కు కరెంట్ను పెంచుతుంది. ప్రధానంగా, వెలుపల దశ పరిస్థితి లేదు.
- సర్వో మోటారుల ద్వారా హై-స్పీడ్ ఆపరేషన్ సాధ్యమవుతుంది.
ఇది సర్వో మోటార్ వర్కింగ్ సూత్రం గురించి మరియు 8051 మైక్రోకంట్రోలర్తో ఇంటర్ఫేసింగ్ .మరియు, ఈ వ్యాసానికి సంబంధించి ఏదైనా సాంకేతిక సహాయం కోసం లేదా ఎలక్ట్రానిక్స్ ప్రాజెక్టులు ఇవి RTC, OLED, ఫ్లాష్ మెమరీ, అనుకూలీకరించిన LCD, టచ్ స్క్రీన్ డిస్ప్లేలు మరియు వంటి ఇంటర్ఫేసింగ్ పరికరాలను ఉపయోగించి రూపొందించబడ్డాయి. దిగువ వ్యాఖ్య విభాగంలో మీ వ్యాఖ్యలను ఇవ్వడం ద్వారా మీరు మమ్మల్ని సంప్రదించవచ్చు.