ఈ పోస్ట్లో మేము అల్యూమినియం పైపులు మరియు బోల్ట్లను ఉపయోగించి క్వాడ్కాప్టర్ బాడీ అసెంబ్లీ యొక్క ప్రాథమికాలను చర్చిస్తాము, వ్యాసం యొక్క తరువాతి విభాగాలలో, సంక్లిష్టమైన మైక్రోకంట్రోలర్లను బట్టి చిన్న డ్రోన్ అసెంబ్లీని ఎగురవేయడానికి ఉపయోగపడే సాధారణ డ్రోన్ సర్క్యూట్ గురించి కూడా చర్చిస్తాము.
క్వాడ్కాప్టర్ బహుశా కనీస మొత్తంలో ఏరోడైనమిక్ ఖచ్చితత్వం మరియు సమస్యలు అవసరమయ్యే సరళమైన ఎగిరే యంత్రం, అందువల్ల ఇది ఆశ్చర్యం కలిగించదు, దీనిని విజయవంతంగా నిర్మించగల వివిధ అభిరుచి గలవారిలో ఇది అపారమైన ప్రజాదరణను పొందగలదు .... అవి వాస్తవానికి ఎగురుతున్న ఒక యంత్రం మరియు వారి ఇష్టానుసారం నియంత్రణ.
క్వాడ్కాప్టర్ డైనమిక్స్
సాంకేతికత మరియు డైనమిక్స్ పరంగా క్వాడ్కాప్టర్ డ్రోన్ సరళమైనది అనే వాస్తవం వాస్తవానికి 4 ప్రొపెల్లర్లు మరియు సమతుల్య ఫ్రేమ్ స్ట్రక్చర్ యొక్క ప్రమేయం కారణంగా ఉంది, ఇది యంత్రం కష్టతరమైన వాతావరణ పరిస్థితులలో కూడా మంచి సమతుల్యతతో ప్రయాణించడానికి వీలు కల్పిస్తుంది.
సాంప్రదాయిక విమానం మరియు ఛాపర్ మోడళ్ల వలె వ్యవస్థ సమర్థవంతంగా ఉండకపోవచ్చని సరళత సూచిస్తుంది, ఇవి వేగం మరియు ఇంధన వినియోగం పరంగా తీవ్ర సామర్థ్యాన్ని ప్రదర్శించడానికి సంక్లిష్టంగా రూపొందించబడ్డాయి మరియు కోర్సు లోడ్ మోసే సామర్ధ్యం ... ఇవన్నీ తప్పనిసరిగా కావచ్చు సాధారణ క్వాడ్కాప్టర్ వ్యవస్థలో లేకపోవడం.
ఏదేమైనా, ఒక అభిరుచి ప్రాజెక్టుకు సంబంధించినంతవరకు, ఈ యంత్రం చాలా మంది ts త్సాహికులకు ఆదర్శవంతమైన ఎంపికగా మారుతుంది, ఇంట్లో వారి స్వంతంగా ఎగిరే యంత్రాన్ని నిర్మించడం చాలా వినోదభరితంగా మరియు చమత్కారంగా అనిపిస్తుంది, ఇది చివరికి 'వింటుంది' మరియు ఏ దిశకు ఎగురుతుంది వినియోగదారు దానిని తరలించడానికి ఇష్టపడతారు.
ఏదేమైనా, క్రొత్త ఆటగాడి కోసం, సాంకేతికంగా అంత సమాచారం లేని వారు అర్థం చేసుకోవడానికి ఈ సరళమైన యంత్రాన్ని కూడా చాలా క్లిష్టంగా చూడవచ్చు, ఎందుకంటే చాలా వెబ్సైట్లలో అందించిన సంబంధిత సమాచారం చాలావరకు స్పష్టంగా మరియు ఒక 'భాష'లో చర్చించడంలో విఫలమవుతుంది. ఒక సామాన్యుడికి సరిపోతుంది.
అద్భుతమైన ఎగిరే యంత్రాన్ని నిర్మించటానికి ఆసక్తి ఉన్న కాని జీర్ణించుకోలేని విషయాన్ని కనుగొనే సాంకేతిక నిపుణుల కోసం ఈ వ్యాసం ప్రత్యేకంగా వ్రాయబడింది.
ఈ రోజు క్వాడ్కాప్టర్లు ఎందుకు నిర్మించటం చాలా సులభం
నేటి ప్రపంచంలో క్వాడ్కాప్టర్లు మరియు డ్రోన్లు నిర్మించడం చాలా సులభం మరియు ఇంతకుముందు విద్యుత్తును ఉపయోగించడం అసాధ్యం అని మీరు ఎప్పుడైనా ఆలోచిస్తున్నారా?
ఇది ప్రాథమికంగా లి-అయాన్ బ్యాటరీల అభివృద్ధి మరియు మెరుగుదల కారణంగా ఉంది. ఇవి నేడు అందుబాటులో ఉన్న బ్యాటరీల యొక్క అత్యంత సమర్థవంతమైన రూపం, ఇవి బరువు నిష్పత్తికి అద్భుతమైన శక్తిని అందిస్తాయి. దీనితో పాటు, డ్రోన్లను సులభంగా నిర్మించగలిగేలా చేయడానికి BLDC మోటార్లు మరియు అత్యంత శుద్ధి చేసిన శాశ్వత మాగ్నెట్ మోటార్లు కూడా దోహదపడ్డాయి.
లి-అయాన్ బ్యాటరీ మోటారులపై అద్భుతమైన భ్రమణ టార్క్ను అందించగలదు, ఇది క్వాడ్కాప్టర్ యూనిట్ను సెకన్ల వ్యవధిలో భూమికి ఎత్తైన ఎత్తుకు నెట్టడానికి సరిపోతుంది మరియు ఇది ఎక్కువ కాలం గాలిలో ఉండటానికి అనుమతిస్తుంది. పనితీరు చాలా సమర్థవంతంగా మరియు ఉపయోగకరంగా ఉంటుంది.
క్వాడ్కాప్టర్ ఎలా ఎగురుతుంది
ఇప్పుడు సరైన మార్గంలో దూకి, క్వాడ్కాప్టర్ను విజయవంతంగా ఎగరడానికి అవసరమైన విషయాలు ఏమిటో అర్థం చేసుకుందాం. యంత్రాన్ని సజావుగా ఎగరడానికి ప్రాథమిక అంశాలు ఇక్కడ ఉన్నాయి:


1) ప్రాథమికంగా యంత్రానికి దృ and మైన మరియు బలమైన శరీరం అవసరం, కానీ బరువులో చాలా తేలికైనది. బోలు చదరపు అల్యూమినియం ఎక్స్ట్రాషన్ పైపులను ఉపయోగించి, రంధ్రాలు వేయడం ద్వారా మరియు ఫ్రేమ్ను గింజలు మరియు బోల్ట్లతో పరిష్కరించడం ద్వారా దీనిని తయారు చేయవచ్చు.
2) నిర్మాణం ఖచ్చితమైన '+' లేదా పరిపూర్ణమైన 'x' రూపంలో ఉండాలి, 'క్రాసింగ్' పైపుల మధ్య కోణం ఒక్కొక్కటి 90 డిగ్రీల వద్ద ఉన్నంత వరకు ఇది తేడా ఉండదు.

క్వాడ్కాప్టర్ను నిర్మించడానికి అవసరమైన ప్రాథమిక అంశాలను ఈ క్రింది చిత్రంలో చూడవచ్చు:

పార్ట్ అసెంబ్లీ అనుకరణ
దిగువ కఠినమైన యానిమేటెడ్ అనుకరణ పైన చూపిన అంశాలను ఎలా సమీకరించాలో చూపిస్తుంది:

క్వాడ్కాప్టర్ ఫ్రేమ్వర్క్ను ఎలా నిర్మించాలి
'+' ఫ్రేమ్ కోసం అల్యూమినియం క్రింద చూపిన విధంగా, రెడీమేడ్ అల్యూమినియం ఎక్స్ట్రాషన్ గొట్టాలను తగిన విధంగా కత్తిరించడం మరియు పరిమాణం చేయడం ద్వారా పొందవచ్చు:

ఫ్రేమ్ యొక్క పరిమాణం సాపేక్షమైనది మరియు అందువల్ల కీలకం కాదు, మీరు మోటార్లు విస్తృతంగా వేరుగా అమర్చబడి విస్తృత మోటారును నిర్మించవచ్చు లేదా మోటార్లు చాలా వెడల్పుగా లేని చోట కాంపాక్ట్ ఫ్రేమ్ నిర్మాణాన్ని నిర్మించవచ్చు ... అయినప్పటికీ ఇది తప్పకుండా ఉండాలి మెరుగైన సమతుల్యత మరియు సమతుల్యతను ప్రారంభించడానికి ప్రొపెల్లర్లు ఒకదానికొకటి దూరంగా ఉంటాయి.
3) '+' ఫ్రేమ్ నిర్మాణాన్ని తప్పనిసరిగా సెంట్రల్ సెక్షన్ వద్ద ఒక చదరపు ప్లాట్ఫారమ్తో అమర్చాలి, ఇక్కడ ఫ్రేమ్ చేతులు ఒకదానికొకటి కలుస్తాయి. అవసరమైన ఎలక్ట్రానిక్స్ మరియు వైరింగ్లను సౌకర్యవంతంగా ఉంచడానికి తగిన పరిమాణంలో చక్కగా పాలిష్ చేసిన అల్యూమినియం ప్లేట్ ఇది కావచ్చు.
అందువల్ల ఈ సెంట్రల్ ప్లేట్ లేదా ప్లాట్ఫాం ప్రాథమికంగా సిస్టమ్ యొక్క ఎలక్ట్రానిక్లను వ్యవస్థాపించడానికి మరియు ఉంచడానికి అవసరమవుతుంది, ఇది చివరికి మీ క్వాడ్కాప్టర్ను నియంత్రించడానికి బాధ్యత వహిస్తుంది.
4) పై ఫ్రేమ్వర్క్ పూర్తయిన తర్వాత, పై బొమ్మలలో చూపిన విధంగా మోటార్లు క్రాస్ బార్ల చివరలను పరిష్కరించాల్సిన అవసరం ఉంది.
5) అన్ని యుక్తమైన పనిని చాలా ఖచ్చితత్వంతో, మరియు ఖచ్చితమైన అమరికతో చేయాల్సిన అవసరం ఉందని చెప్పనవసరం లేదు, దీనికి ఉద్యోగం కోసం అనుభవజ్ఞుడైన ఫాబ్రికేటర్ యొక్క అనుబంధం అవసరం కావచ్చు.
రూపకల్పనలోని ప్రతిదీ జతలలో ఉన్నందున, మూలకాలను కచ్చితంగా సమలేఖనం చేయడం చాలా కష్టం కాదు, ఇది జతలను పరిమాణాన్ని మరియు అమర్చడం గురించి సాధ్యమైనంత ఎక్కువ సారూప్యతతో ఉంటుంది, ఇది గరిష్ట స్థాయి సమతుల్యత, సమతుల్యత మరియు సమకాలీకరణను నిర్ధారిస్తుంది సిస్టమ్ కోసం.
ఫ్రేమ్వర్క్ నిర్మించిన తర్వాత, ఎలక్ట్రానిక్ సర్క్యూట్లను సంబంధిత మోటారులతో అనుసంధానించే సమయం వచ్చింది. ఇచ్చిన సర్క్యూట్ మాన్యువల్లో అందించిన సూచనల ప్రకారం ఇది చేయవలసి ఉంటుంది.
సర్క్యూట్ బోర్డులను సెంట్రల్ ప్లేట్ యొక్క దిగువ భాగంలో సముచితంగా గృహనిర్మాణంతో లేదా ప్లేట్ మీద అమర్చవచ్చు, మళ్ళీ దాన్ని గట్టిగా జతచేయడానికి తగిన క్యాబినెట్తో.

ప్రొపెల్లర్ల భ్రమణ దిశను అర్థం చేసుకోవడం
సమతుల్య లిఫ్ట్-ఆఫ్ కోసం మోటారు ప్రొపెల్లర్ల భ్రమణ దిశను విశ్లేషించడం:
పై యానిమేటెడ్ అనుకరణను సూచిస్తూ, మోటారు ప్రొపెల్లర్ల భ్రమణ దిశను ఈ క్రింది పద్ధతిలో సమలేఖనం చేయాలి:
ఇది కేవలం ఒక రాడ్ చివర్లలోని మోటార్లు ఒకేలా ఉండాలి కాని ఇతర రాడ్ మోటారు దిశకు భిన్నంగా ఉండాలి, అనగా ఒక రాడ్ సవ్యదిశలో తిరుగుతున్న మోటార్లు ఉంటే, మరొకటి చివరన ఉన్న మోటార్లు యాంటీ-సవ్యదిశలో స్పిన్ చేయడానికి రాడ్ ట్యూన్ చేయాలి. దిశ.
మోటారుల యొక్క కౌంటర్-యాక్టింగ్ కదలికను సరిగ్గా అర్థం చేసుకోవడానికి దయచేసి పై అనుకరణను చూడండి, వీటిని సమతుల్యంగా తీసుకునేలా మోటారులకు కేటాయించాల్సిన అవసరం ఉంది
మోటారుల వేగాన్ని నియంత్రించడం ద్వారా క్వాడ్కాప్టర్ దిశను ఎలా నియంత్రించాలి.
అవును, క్వాడ్కాప్టర్ యొక్క ఎగిరే దిశను మీ స్వంత కోరిక ప్రకారం సర్దుబాటు చేయవచ్చు మరియు నియంత్రించవచ్చు మరియు సంబంధిత మోటారులకు వేర్వేరు వేగం (RPM) ను వర్తింపజేయడం ద్వారా.
యంత్రానికి కావలసిన ఎగిరే దిశను సాధించడానికి మరియు అమలు చేయడానికి సంబంధిత మోటారులకు ప్రాథమిక వేగం ప్రసారం ఎలా వర్తించవచ్చో క్రింది చిత్రాలు చూపుతాయి:




పై రేఖాచిత్రాలలో సూచించినట్లుగా, మోటారుల సమితి యొక్క వేగాన్ని సముచితంగా తగ్గించడం ద్వారా లేదా వ్యతిరేక మోటారుల వేగాన్ని పెంచడం ద్వారా లేదా వేగం యొక్క స్వంత ప్రాధాన్యత ప్రకారం ట్వీకింగ్ చేయడం ద్వారా క్వాడ్కాప్టర్ గాలిలో ప్రయాణించడానికి ఏదైనా చేయవచ్చు కావలసిన నిర్దిష్ట దిశ.
పై చిత్రాలు ఫార్వర్డ్, రివర్స్, రైట్, లెఫ్ట్ మొదలైన ప్రాథమిక దిశలను సూచిస్తాయి ... అయితే ఇతర మోసపూరిత దిశలను కూడా సంబంధిత మోటారుల వేగాన్ని తగిన విధంగా సర్దుబాటు చేయడం ద్వారా సమర్థవంతంగా అమలు చేయవచ్చు లేదా ఒకే మోటారు కావచ్చు.
ఉదాహరణకు, యంత్రాన్ని N / W దిశ వైపు ఎగరడానికి బలవంతం చేయడానికి, S / E మోటారు యొక్క వేగాన్ని మాత్రమే పెంచవచ్చు మరియు యంత్రాన్ని N / E దిశలో ఎగరడానికి వీలు కల్పించడానికి, S / యొక్క వేగం W మోటారును పెంచవచ్చు ... మరియు మొదలైనవి. క్వాడ్కాప్టర్ యొక్క పూర్తి నియంత్రణ వినియోగదారు సాధించగలిగే వరకు మరియు ప్రావీణ్యం పొందే వరకు ఇది సాధన చేయాలి.
ప్రాక్టికల్ క్వాడ్కాప్టర్ రూపకల్పన
డ్రోన్ బాడీ మరియు హార్డ్వేర్ యొక్క ప్రాథమిక నిర్మాణం గురించి ఇప్పటివరకు మేము తెలుసుకున్నాము, ఇప్పుడు చాలా సాధారణ భాగాలను ఉపయోగించి క్వాడ్కాప్టర్ లేదా డ్రోన్ సర్క్యూట్ను ఎలా త్వరగా మరియు చౌకగా తయారు చేయాలో నేర్చుకుందాం. మైక్రోకంట్రోలర్ను ఉపయోగించకుండా సాపేక్షంగా సంక్లిష్టమైన మరియు సమర్థవంతమైన క్వాడ్కాప్టర్ ఎగిరే యంత్రాన్ని ఎలా తయారు చేయాలో నా మునుపటి పోస్ట్లలో ఒకటి నేర్చుకున్నాము, మరింత సమాచారం కోసం మీరు ఈ క్రింది పోస్ట్ల ద్వారా వెళ్లాలనుకుంటున్నారు:
MCU లేకుండా రిమోట్ కంట్రోల్ సర్క్యూట్ | ఎలక్ట్రానిక్ సర్క్యూట్
ప్రస్తుత వ్యాసంలో బ్రష్ లేని మోటార్లు తొలగించి, బ్రష్ చేసిన మోటారులతో భర్తీ చేయడం ద్వారా పై డిజైన్ను చాలా సరళంగా చేయడానికి ప్రయత్నిస్తాము మరియు తత్ఫలితంగా కాంప్లెక్స్ను వదిలించుకోవడానికి వీలు కల్పిస్తుంది BLDC డ్రైవర్ సర్క్యూట్ మాడ్యూల్ .
క్వాడ్కాప్టర్ యొక్క యాంత్రిక నిర్మాణ వివరాలు ఇప్పటికే సమగ్రంగా చర్చించబడినందున, మేము సర్క్యూట్ డిజైన్ విభాగంతో మాత్రమే వ్యవహరిస్తాము మరియు ప్రతిపాదిత సరళమైన డ్రోన్ సర్క్యూట్ను ఎగురుతూ ఎలా నిర్మించవచ్చో తెలుసుకుంటాము.
ఇంతకు ముందు చెప్పినట్లుగా, ఈ సాధారణ క్వాడ్కాప్టర్కు దిగువ ఉదాహరణ చిత్రంలో చూపిన విధంగా ప్రాథమిక RF రిమోట్ కంట్రోల్ మాడ్యూల్స్ మాత్రమే అవసరం:

మీరు అవసరం ఈ RF గుణకాలు కొనండి ఏదైనా ఆన్లైన్ స్టోర్ నుండి లేదా మీ స్థానిక ఎలక్ట్రానిక్ విడి డీలర్ నుండి:
పైన పేర్కొన్నవి కాకుండా RF మాడ్యూళ్ళను రిమోట్ చేస్తుంది డ్రోన్ మెషిన్ యొక్క హృదయాన్ని ఏర్పరుచుకునే 4 శాశ్వత అయస్కాంత బ్రష్ మోటార్లు కూడా అవసరం. ఇది ఇచ్చిన వర్ణనలతో కింది చిత్రంలో పేర్కొన్నట్లుగా ఉండవచ్చు లేదా అవసరమైన యూజర్ స్పెసిఫికేషన్ల ప్రకారం ఏదైనా ఉండవచ్చు:

మోటార్ యొక్క విద్యుత్ లక్షణాలు:
- 6 వి = ఆపరేటింగ్ వోల్టేజ్ (పీక్ 12 వి)
- 200 ఎంఏ = ఆపరేటింగ్ కరెంట్
- 10,000 = ఆర్పిఎం
భాగాల జాబితా
- 1 కె, 10 కె 1/4 వాట్ = 1 ఒక్కొక్కటి
- 1uF / 25V కెపాసిటర్ = 1 నో
- ప్రీసెట్ 10 కె లేదా 5 కె = 1 నో
- Rx = 5 వాట్ల వైర్వౌండ్ రెసిస్టర్, ప్రయోగంతో ధృవీకరించవలసిన విలువ.
- IC 555 = 1 నో
- 1N4148 డయోడ్లు = 2 నోస్
- IRF9540 మోస్ఫెట్ = 1 నో
- 6 వి మోటర్ బ్రష్డ్ టైప్ = 4 నోస్
- సౌకర్యవంతమైన వైర్లు, టంకము, ఫ్లక్స్ మొదలైనవి.
- పై భాగాలను సమీకరించటానికి సాధారణ ప్రయోజనం పిసిబి
- సంబంధిత చిత్రాలలో చూపిన విధంగా 4 ఛానల్ RF రిమోట్ కంట్రోల్ మాడ్యూల్.
- వ్యాసంలో వివరించిన విధంగా అల్యూమినియం ఛానెల్స్, స్క్రూలు, కాయలు, ప్లేట్లు మొదలైనవి.
- క్రింద చూపిన విధంగా బ్యాటరీ:

మోటారులతో రిమోట్ కంట్రోల్ రిసీవర్ను ఎలా కాన్ఫిగర్ చేయాలి
క్వాడ్కాప్టర్ మోటారులతో రిమోట్ కంట్రోల్ రిసీవర్ను ఎలా కాన్ఫిగర్ చేయాలో అర్థం చేసుకోవడానికి ముందు, అవసరమైన ఎడమ, కుడి, ముందుకు, వెనుకబడిన కదలికలను ఉత్పత్తి చేయడానికి మోటారు వేగం ఎలా సర్దుబాటు చేయబడాలి లేదా సమలేఖనం చేయబడుతుందో తెలుసుకోవడం చాలా ముఖ్యం.
ప్రధానంగా క్వాడ్కాప్టర్ను తరలించడానికి రెండు మార్గాలు ఉన్నాయి, అవి '+' మరియు 'x'modes లో ఉన్నాయి. కింది రేఖాచిత్రంలో సూచించిన విధంగా మా డిజైన్లో మా డ్రోన్ కోసం ప్రాథమిక '+' మోషన్ మోడ్ను ఉపయోగిస్తాము:

పై రేఖాచిత్రాన్ని ప్రస్తావిస్తూ, డ్రోన్పై కావలసిన దిశాత్మక విన్యాసాలను అమలు చేయడానికి సంబంధిత మోటారుల వేగాన్ని తగిన విధంగా పెంచాల్సిన అవసరం ఉందని మేము గ్రహించాము.
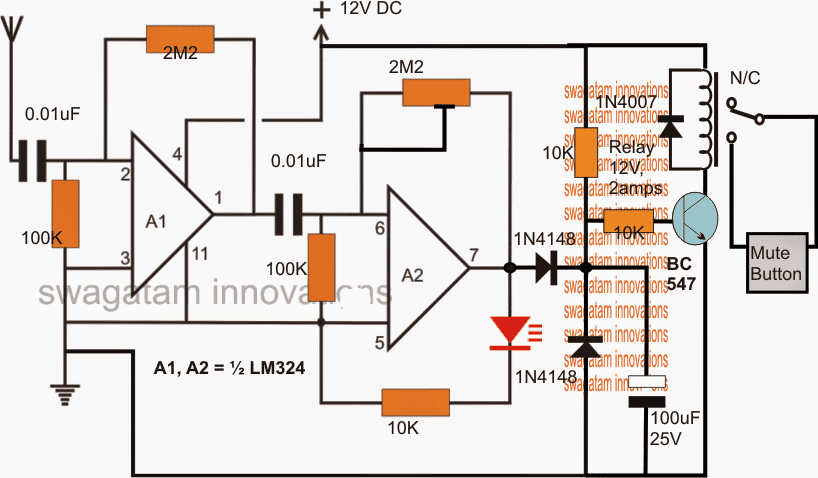
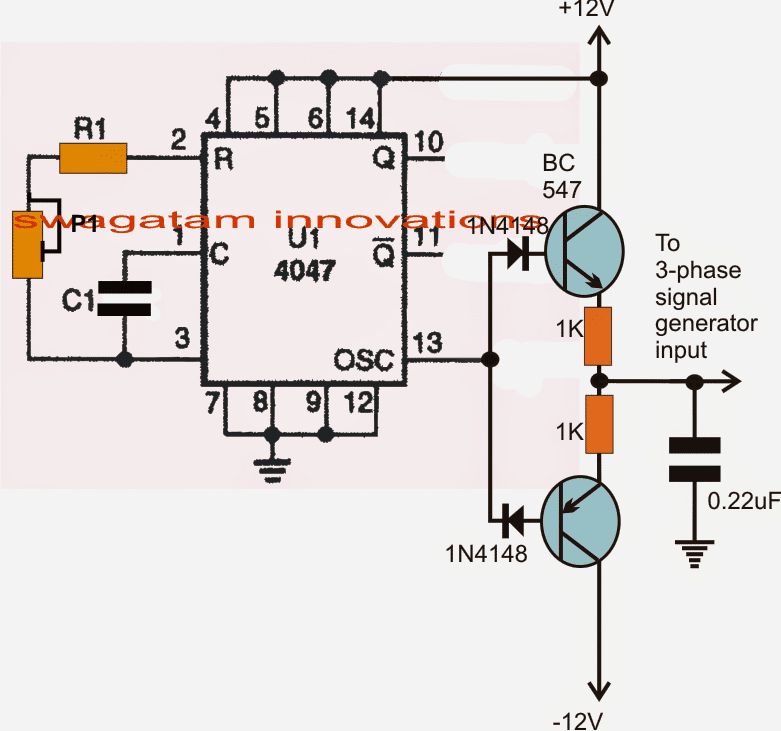
కింది వైరింగ్ రేఖాచిత్రం ప్రకారం రిమోట్ కంట్రోల్ రిలేలను కాన్ఫిగర్ చేయడం ద్వారా ఈ వేగం పెరుగుదల అమలు చేయవచ్చు. దిగువ రేఖాచిత్రంలో మనం ఒక చూడవచ్చు IC 555 PWM సర్క్యూట్ 6 రిలేల యొక్క రిమోట్ కంట్రోల్ రిసీవర్ మాడ్యూల్ యొక్క 4 రిలేలతో వైర్డు చేయబడింది (1 రిలే ఉపయోగించబడలేదు మరియు స్థలం మరియు బరువును తగ్గించడానికి తొలగించవచ్చు).
పిడబ్ల్యుఎం సర్దుబాటు
రేఖాచిత్రంలో చూసినట్లుగా, PWM ఫీడ్ రిలేల యొక్క అన్ని N / C పరిచయాలతో అనుసంధానించబడి ఉంది, ఇది సాధారణంగా క్వాడ్కాప్టర్ ఈ ఏకరీతి మరియు సమానమైన PWM ఫీడ్ ద్వారా కొట్టుమిట్టాడుతుందని సూచిస్తుంది, దీని విధి చక్రం ప్రారంభంలో సర్దుబాటు చేయబడవచ్చు క్వాడ్కాప్టర్ సరైన నిర్ధిష్ట మొత్తాన్ని మరియు ఎత్తును పొందగలదు.
చూపిన PWM కుండను తగిన విధంగా సర్దుబాటు చేయడం ద్వారా దీనిని ప్రయోగించవచ్చు.
రిలే పరిచయాలను ఎలా కాన్ఫిగర్ చేయాలి
రిలేల యొక్క N / O పరిచయాలు సానుకూల సరఫరాతో నేరుగా వైర్డుగా చూడవచ్చు, కాబట్టి రిమోట్ ట్రాన్స్మిటర్ హ్యాండ్సెట్లో సంబంధిత బటన్ను నొక్కినప్పుడు, సంబంధిత రిలే రిసీవర్ మాడ్యూల్లో సక్రియం అవుతుంది, దీనివల్ల సంబంధిత మోటారును పొందటానికి వీలు కల్పిస్తుంది బ్యాటరీ నుండి పూర్తి 12 వి సరఫరా.
పై ఆపరేషన్ సక్రియం చేయబడిన మోటారు మిగతా మోటారుల కంటే ఎక్కువ వేగాన్ని పొందటానికి అనుమతిస్తుంది, ఇది క్వాడ్కాప్టర్ నిర్ణీత దిశ వైపు వెళ్ళటానికి అనుమతిస్తుంది.
రిమోట్ బటన్ విడుదలైన వెంటనే, డ్రోన్ తక్షణమే ఆగి స్థిరమైన మోడ్లో తిరుగుతూనే ఉంటుంది.
అదేవిధంగా, రిమోట్ హ్యాండ్సెట్లో కేటాయించిన ఇతర బటన్లను నొక్కడం ద్వారా ఇతర దిశాత్మక కదలికలను సాధించవచ్చు.
మెషీన్ యొక్క సురక్షితమైన ల్యాండింగ్ను నిర్ధారించడానికి టాప్ రిలే, చూపిన రిలే యొక్క N / O పరిచయంతో సిరీస్లో ప్రస్తుత డ్రాపింగ్ రెసిస్టర్ను జోడించడం ద్వారా ఇది జరుగుతుంది.
ఈ రెసిస్టర్ విలువను కొన్ని ప్రయోగాలతో లెక్కించాలి, అంటే ఈ రెసిస్టర్ను అటాచ్ చేసిన రిలే ద్వారా టోగుల్ చేసినప్పుడు క్వాడ్కాప్టర్ భూమికి రెండు అడుగుల చుట్టూ తిరుగుతుంది.
సర్క్యూట్ రేఖాచిత్రం

చూపిన రిలేలు RF మాడ్యూల్ రిసీవర్ యొక్క భాగం, దీని పరిచయాలు మొదట్లో అనుసంధానించబడలేదు (అప్రమేయంగా ఖాళీగా ఉంటాయి) మరియు పై రేఖాచిత్రంలో సూచించిన విధంగా వైర్ అవసరం.
RF రిమోట్ రిసీవర్ క్వాడ్కాప్టర్ లోపల వ్యవస్థాపించబడాలి మరియు పైన చూపిన లేఅవుట్ ప్రకారం దాని రిలేలు సంబంధిత మోటార్లు మరియు బ్యాటరీతో వైర్ చేయబడతాయి.
మీరు కొన్ని కనెక్టర్లను (ఆకుపచ్చ రంగు) చూడవచ్చు, ఇవి అనవసరంగా డ్రోన్పై బరువును పెంచుతాయి. బరువు తగ్గించడానికి మీరు అవన్నీ తీసివేయవచ్చు మరియు టంకం ద్వారా సంబంధిత వైర్లను నేరుగా పిసిబికి కనెక్ట్ చేయవచ్చు.
డ్రోన్ ఎలా కదులుతుంది:
పై చర్చలో వివరించినట్లుగా, ఒక నిర్దిష్ట రిమోట్ బటన్ నొక్కినప్పుడు, అది క్వాడ్కాప్టర్ మాడ్యూల్ యొక్క సంబంధిత రిలేను అమలు చేస్తుంది, దీనివల్ల సంబంధిత మోటారు వేగంగా కదులుతుంది.
ఈ ఆపరేషన్ యంత్రాన్ని మోటారుకు వ్యతిరేక దిశలో కదలడానికి బలవంతం చేస్తుంది, ఇది వేగంగా RPM వద్ద తిప్పడానికి మారుతుంది.
ఉదాహరణకు, దక్షిణ మోటారు వేగాన్ని పెంచడం వలన యంత్రం ఉత్తరం వైపు కదులుతుంది, ఉత్తర మోటారును పెంచడం వలన అది దక్షిణ దిశగా కదులుతుంది, అదేవిధంగా తూర్పు మోటారు వేగం పెరగడం వలన అది పడమర వైపుకు వెళుతుంది మరియు దీనికి విరుద్ధంగా ఉంటుంది.
ఆసక్తికరంగా, దక్షిణ / తూర్పు మోటార్లు పెంచడం వల్ల క్వాడ్కాప్టర్ వికర్ణ రీతిలో ఉన్న ఉత్తరం / పడమర వైపుకు వెళ్ళటానికి వీలు కల్పిస్తుంది .... మరియు.
పైన వివరించిన సింప్స్ కాడ్కాప్టర్ రిమోట్ కంట్రోల్ సర్క్యూట్ యొక్క లాభాలు మరియు నష్టాలు.
ప్రోస్
- సాపేక్షంగా క్రొత్త అభిరుచి గలవారు కూడా చౌకగా మరియు నిర్మించడం సులభం.
- సంక్లిష్టమైన జాయ్ స్టిక్ ఆపరేషన్లు అవసరం లేదు.
- ఒకే 6 ఛానల్ రిమోట్ కంట్రోల్ మాడ్యూల్ ఉపయోగించి నియంత్రించవచ్చు
కాన్స్
- బ్రష్ చేసిన మోటారుల ప్రమేయం కారణంగా బ్యాటరీ బ్యాకప్ పరంగా తక్కువ సామర్థ్యం
- డైరెక్షనల్ వేగం స్థిరంగా ఉంటుంది మరియు రిమోట్ కంట్రోల్ హ్యాండ్సెట్ ద్వారా వైవిధ్యంగా ఉండదు
- బటన్లను మార్చేటప్పుడు యుక్తి కొంచెం జెర్కీగా ఉండకపోవచ్చు.
మునుపటి: ఫోర్స్ సెన్సింగ్ రెసిస్టర్ వివరించబడింది తర్వాత: కెపాసిటివ్ వోల్టేజ్ డివైడర్