పోస్ట్ వారి కార్యాచరణ స్పెసిఫికేషన్లను ప్రభావితం చేయకుండా సిసి ఫేజ్ వేరియబుల్ ఫ్రీక్వెన్సీ డ్రైవ్ సర్క్యూట్ లేదా ఎసి మోటర్ స్పెడ్ను నియంత్రించడానికి ఒక విఎఫ్డి సర్క్యూట్ గురించి చర్చిస్తుంది.
VFD అంటే ఏమిటి
మోటార్లు మరియు ఇతర సారూప్య ప్రేరక లోడ్లు ప్రత్యేకంగా వాటి ఉత్పాదక స్పెక్స్లో లేని పౌన encies పున్యాలతో పనిచేయడం ఇష్టపడవు మరియు అలాంటి అసాధారణ పరిస్థితులలో బలవంతం చేస్తే చాలా అసమర్థంగా మారతాయి.
ఉదాహరణకు, 60Hz తో పనిచేయడానికి పేర్కొన్న మోటారు 50 Hz లేదా ఇతర శ్రేణుల పౌన encies పున్యాలతో పనిచేయడానికి సిఫారసు చేయబడదు.
అలా చేయడం వలన మోటారును వేడి చేయడం, అవసరమైన వేగం కంటే తక్కువ లేదా అంతకంటే ఎక్కువ మరియు అసాధారణంగా అధిక వినియోగం వంటివి అవాంఛనీయ ఫలితాలను ఇస్తాయి, ఇవి చాలా అసమర్థంగా మరియు కనెక్ట్ చేయబడిన పరికరం యొక్క తక్కువ జీవిత క్షీణతను కలిగిస్తాయి.
అయినప్పటికీ వేర్వేరు ఇన్పుట్ ఫ్రీక్వెన్సీ పరిస్థితులలో ఆపరేటింగ్ మోటార్లు తరచుగా బలవంతం అవుతాయి మరియు అటువంటి పరిస్థితులలో VFD లేదా వేరియబుల్ ఫ్రీక్వెన్సీ డ్రైవ్ సర్క్యూట్ చాలా సులభమవుతుంది.
VFD అనేది మోటారు స్పెసిఫికేషన్ల ప్రకారం ఇన్పుట్ సరఫరా యొక్క ఫ్రీక్వెన్సీ మరియు వోల్టేజ్ను సర్దుబాటు చేయడం ద్వారా AC మోటారు వేగాన్ని నియంత్రించడానికి వినియోగదారుని అనుమతించే పరికరం.
మోటారు స్పెసిఫికేషన్ల ప్రకారం VFD ఫ్రీక్వెన్సీ మరియు వోల్టేజ్ను అనుకూలీకరించడం ద్వారా, వోల్టేజ్ మరియు ఫ్రీక్వెన్సీ స్పెక్స్తో సంబంధం లేకుండా ఏదైనా ఎసి మోటారును అందుబాటులో ఉన్న గ్రిడ్ ఎసి సరఫరా ద్వారా ఆపరేట్ చేయడానికి VFD అనుమతిస్తుంది.
వేర్వేరు ఫ్రీక్వెన్సీ క్రమాంకనంతో స్కేల్ చేయబడిన వేరియబుల్ నాబ్ రూపంలో ఇచ్చిన నియంత్రణను ఉపయోగించి ఇది సాధారణంగా జరుగుతుంది.
ఇంట్లో VFD ను తయారు చేయడం చాలా కష్టమైన ప్రతిపాదన అనిపించవచ్చు, అయితే క్రింద సూచించిన డిజైన్ను పరిశీలిస్తే, ఈ చాలా ఉపయోగకరమైన పరికరాన్ని (నా చేత రూపొందించబడింది) నిర్మించడం అంత కష్టం కాదని తెలుస్తుంది.
సర్క్యూట్ ఆపరేషన్
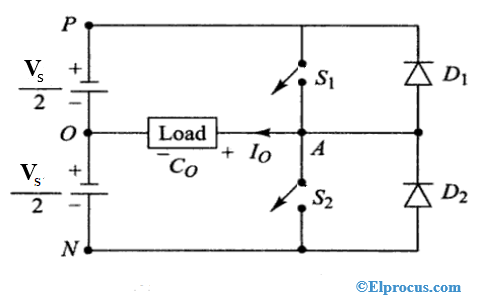
సర్క్యూట్ను ప్రాథమికంగా రెండు దశలుగా విభజించవచ్చు: సగం బ్రిజ్ డ్రైవర్ దశ మరియు పిడబ్ల్యుఎం లాజిక్ జనరేటర్ దశ.
సగం వంతెన డ్రైవర్ దశ సగం వంతెన డ్రైవర్ IC IR2110 ను ఉపయోగిస్తుంది, ఇది వరుసగా రెండు హై సైడ్ మరియు లో సైడ్ మోస్ఫెట్లను కలుపుతూ అధిక వోల్టేజ్ మోటారు డ్రైవ్ దశను జాగ్రత్తగా చూసుకుంటుంది.
డ్రైవర్ IC ఈ విధంగా సర్క్యూట్ యొక్క హృదయాన్ని ఏర్పరుస్తుంది, అయితే ఈ కీలకమైన పనితీరును అమలు చేయడానికి కొన్ని భాగాలు అవసరం.
పైన పేర్కొన్న IC కి కావలసిన నిర్దిష్ట పౌన .పున్యంలో కనెక్ట్ చేయబడిన లోడ్ను నడపడానికి అధిక తర్కం మరియు పౌన encies పున్యాలలో తక్కువ తర్కం అవసరం.
ఈ హాయ్ మరియు లో ఇన్పుట్ లాజిక్ సిగ్నల్స్ డ్రైవర్ ఐసికి ఆపరేటింగ్ డేటాగా మారతాయి మరియు పేర్కొన్న ఫ్రీక్వెన్సీని నిర్ణయించడానికి సిగ్నల్స్ మరియు మెయిన్స్ ఎసితో దశలో పిడబ్ల్యుఎంలను కలిగి ఉండాలి.
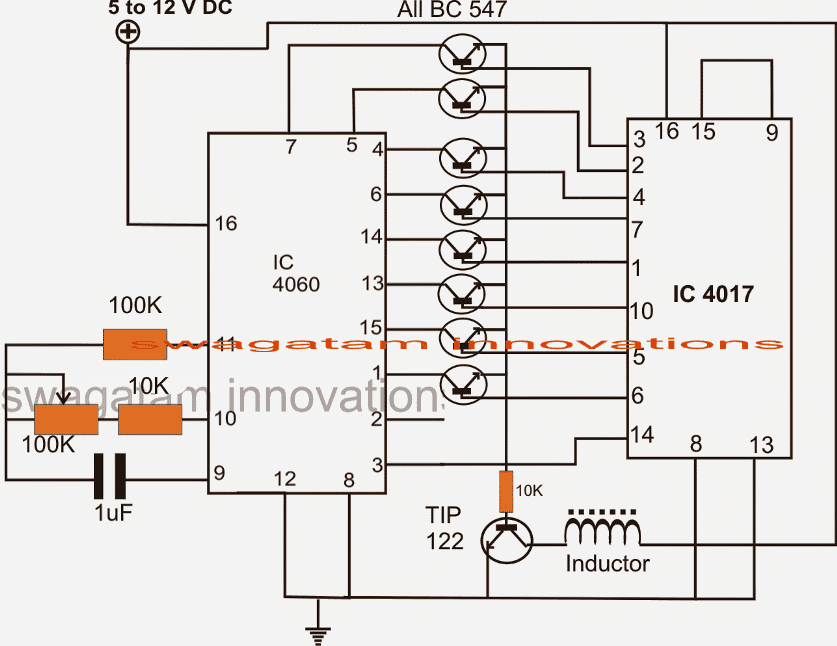
పై సమాచారం 555 ఐసిలు మరియు ఒక దశాబ్దం కౌంటర్లతో కూడిన మరొక దశ ద్వారా సృష్టించబడుతుంది. ఐసి 4017.
రెండు 555 ఐసిలు స్టెప్డ్ డౌన్ బ్రిడ్జ్ రెక్టిఫైయర్ అవుట్పుట్ నుండి పొందిన పూర్తి వేవ్ ఎసి నమూనాకు అనుగుణంగా సవరించిన సైన్ వేవ్ పిడబ్ల్యుఎంలను ఉత్పత్తి చేయడానికి బాధ్యత వహిస్తాయి.
IC4017 టోటెమ్ పోల్ అవుట్పుట్ లాజిక్ జెనరేటర్ వలె పనిచేస్తుంది, దీని ప్రత్యామ్నాయ ఫ్రీక్వెన్సీ రేటు MAIN ఫ్రీక్వెన్సీ అవుతుంది సర్క్యూట్ యొక్క పరామితిని నిర్ణయిస్తుంది.
ఈ నిర్ణయించే పౌన frequency పున్యం IC1 యొక్క పిన్ # 3 నుండి తీసివేయబడుతుంది, ఇది IC2 ట్రిగ్గరింగ్ పిన్ అవుట్ ను ఫీడ్ చేస్తుంది మరియు IC2 యొక్క పిన్ # 3 వద్ద సవరించిన PWM లను సృష్టించడం కోసం.
సవరించిన సైన్ వేవ్ పిడబ్ల్యుఎంలు ఐఆర్ 2110 ను తినే ముందు 4017 ఐసి యొక్క అవుట్పుట్లలో స్కాన్ చేయబడతాయి, సవరించిన పిడబ్ల్యుఎంల యొక్క ఖచ్చితమైన 'ముద్రణ'ను సగం వంతెన డ్రైవర్ యొక్క అవుట్పుట్ వద్ద మరియు చివరికి ఆపరేట్ చేయబడుతున్న మోటారు కోసం.
మోటారుకు సరైన పేర్కొన్న ఫ్రీక్వెన్సీని అందించడానికి Cx మరియు 180k పాట్ విలువలను తగిన విధంగా ఎంచుకోవాలి లేదా సర్దుబాటు చేయాలి.
హై సైడ్ మోస్ఫెట్ యొక్క కాలువ వద్ద ఉన్న అధిక వోల్టేజ్ను తగిన విధంగా లెక్కించాలి మరియు అందుబాటులో ఉన్న మెయిన్స్ వోల్టేజ్ ఎసిని సరిదిద్దడం ద్వారా దానిని సముచితంగా పైకి లేపడం లేదా మోటారు స్పెక్స్ ప్రకారం క్రిందికి దింపడం ద్వారా పొందాలి.
పై సెట్టింగులు నిర్దిష్ట మోటారుకు హెర్ట్జ్ (V / Hz) కు సరైన వోల్ట్లను నిర్ణయిస్తాయి.
రెండు దశలకు సరఫరా వోల్టేజ్ ఒక సాధారణ రేఖగా చేయవచ్చు, భూమి కనెక్షన్కు సమానం.
TR1 అనేది 0-12V / 100mA ట్రాన్స్ఫార్మర్, ఇది అవసరమైన ఆపరేటింగ్ సరఫరా వోల్టేజ్లతో సర్క్యూట్లను అందిస్తుంది.
పిడబ్ల్యుఎం కంట్రోలర్ సర్క్యూట్

మీరు పై రేఖాచిత్రం నుండి IC 4017 నుండి అవుట్పుట్లను కింది రేఖాచిత్రం యొక్క HIN మరియు LIN ఇన్పుట్లకు తగిన విధంగా సమగ్రపరచాలి. అలాగే, పై రేఖాచిత్రంలో సూచించిన 1N4148 డయోడ్లను దిగువ రేఖాచిత్రంలో చూపిన విధంగా తక్కువ వైపు MOSFET గేట్లతో కనెక్ట్ చేయండి.
పూర్తి వంతెన మోటార్ డ్రైవర్

నవీకరణ:

పైన చర్చించిన సాధారణ సింగిల్ VFD డిజైన్ను స్వీయ ఓసిలేటరీ పూర్తి వంతెన IC IRS2453 ను ఉపయోగించడం ద్వారా మరింత సరళీకృతం చేయవచ్చు మరియు మెరుగుపరచవచ్చు, క్రింద చూపిన విధంగా:
ఫుల్ బ్రిడ్జ్ డ్రైవర్ దాని స్వంత ఓసిలేటర్ దశను కలిగి ఉన్నందున ఇక్కడ IC 4017 పూర్తిగా తొలగించబడుతుంది మరియు అందువల్ల ఈ IC కోసం బాహ్య ట్రిగ్గరింగ్ అవసరం లేదు.
పూర్తి వంతెన రూపకల్పన కావడంతో మోటారుకు అవుట్పుట్ నియంత్రణ పూర్తి స్థాయి సున్నా నుండి గరిష్ట వేగం సర్దుబాటు కలిగి ఉంటుంది.
పిసిడబ్ల్యుఎం పద్ధతి ద్వారా మోటారు యొక్క వేగాన్ని మరియు టార్క్ను నియంత్రించడానికి ఐసి 2 యొక్క పిన్ # 5 వద్ద ఉన్న కుండను ఉపయోగించవచ్చు.
V / Hz వేగ నియంత్రణ కోసం, IRS2453 తో అనుబంధించబడిన Rt / Ct మరియు IC1 తో అనుబంధించబడిన R1 తగిన ఫలితాలను పొందడానికి వరుసగా సర్దుబాటు చేయవచ్చు (మానవీయంగా).
ఇంకా సరళతరం

మీరు పూర్తి వంతెన విభాగాన్ని అధికంగా కనుగొంటే, క్రింద చూపిన విధంగా మీరు దానిని P, N-MOSFET ఆధారిత పూర్తి వంతెన సర్క్యూట్తో భర్తీ చేయవచ్చు. ఈ వేరియబుల్ ఫ్రీక్వెన్సీ డ్రైవర్ పూర్తి-బ్రిడ్జ్ డ్రైవర్ విభాగం మినహా అదే భావనను ఉపయోగిస్తుంది, ఇది అధిక వైపు P- ఛానల్ MOSFET లను మరియు తక్కువ వైపు N- ఛానల్ MOSFETS ను ఉపయోగిస్తుంది.
P- ఛానల్ MOSFET ల ప్రమేయం కారణంగా కాన్ఫిగరేషన్ అసమర్థంగా అనిపించినప్పటికీ (వాటి అధిక RDSon రేటింగ్ కారణంగా), చాలా సమాంతర P-MOSFET ల వాడకం తక్కువ RDSon సమస్యను పరిష్కరించడానికి సమర్థవంతమైన విధానం వలె కనిపిస్తుంది.
N- ఛానల్ ప్రతిరూపాలతో సమానంగా, పరికరాల కనిష్ట తాపనను నిర్ధారించడానికి P- ఛానల్ పరికరాలకు సమాంతరంగా 3 MOSFET లు ఉపయోగించబడతాయి.
మునుపటి: MOSFET లను ఎలా రక్షించాలి - బేసిక్స్ వివరించబడ్డాయి తర్వాత: సౌర MPPT అనువర్తనాల కోసం I / V ట్రాకర్ సర్క్యూట్