మైక్రోకంట్రోలర్కు డిసి మోటారును ఇంటర్ఫేసింగ్ చేయడం చాలా పారిశ్రామిక మరియు రోబోటిక్ అనువర్తనాల్లో చాలా ముఖ్యమైన అంశం. DC మోటారును మైక్రోకంట్రోలర్కు ఇంటర్ఫేస్ చేయడం ద్వారా, మేము మోటారు దిశను నియంత్రించవచ్చు, మోటారు వేగాన్ని నియంత్రించవచ్చు. ఈ వ్యాసం మిమ్మల్ని వివరిస్తుంది, 8051 మైక్రోకంట్రోలర్ ఉపయోగించి DC మోటార్ యొక్క స్పీడ్ కంట్రోల్ బ్లూటూత్ ఆండ్రాయిడ్ కంట్రోలర్ సహాయంతో. బ్లాక్ రేఖాచిత్రం క్రింద చూపబడింది.

ఆండ్రాయిడ్ అప్లికేషన్ ద్వారా DC మోటార్ యొక్క స్పీడ్ కంట్రోల్ యొక్క బ్లాక్ రేఖాచిత్రం
Android అప్లికేషన్ ద్వారా DC మోటార్ యొక్క వేగ నియంత్రణ
ఆండ్రాయిడ్ మొబైల్ ఉపయోగించి డిసి మోటర్ యొక్క స్పీడ్ కంట్రోల్ పారిశ్రామిక అనువర్తనాలు, ఎస్కలేటర్లు, ఎలివేటర్లు, రోబోటిక్ అనువర్తనాలు మరియు భద్రతా వ్యవస్థల అనువర్తనం వంటి అనేక అనువర్తనాలు ఉన్నాయి. వినియోగదారు అతని / ఆమె Android స్మార్ట్ఫోన్లో Android అనువర్తనాన్ని ఇన్స్టాల్ చేయాలి.
DC మోటారు వేగాన్ని నియంత్రించడానికి వినియోగదారు ఆదేశాలను పంపవచ్చు. బ్లూటూత్ వైర్లెస్ కమ్యూనికేషన్ వినియోగదారుకు మరియు నియంత్రికకు ఆదేశాలను పంపడానికి ఉపయోగించబడుతుంది. సర్క్యూట్ యొక్క ప్రధాన హార్డ్వేర్ భాగాలు 8051 మైక్రోకంట్రోలర్, మోటారు డ్రైవర్ ఎల్ 293 డి ఐసి, డిసి మోటర్, బ్లూటూత్ మాడ్యూల్ మరియు ఆండ్రాయిడ్ స్మార్ట్ఫోన్.
గురించి మరింత తెలుసుకోవడానికి దయచేసి ఈ లింక్ను చూడండి 8051 మైక్రోకంట్రోలర్ హిస్టరీ అండ్ బేసిక్స్
మైక్రోకంట్రోలర్ పిన్ యొక్క గరిష్ట అవుట్పుట్ కరెంట్ 5 వి వద్ద 15 ఎమ్ఏ అయితే, ఇది డిసి మోటారు పనితీరును చేయదు మరియు మోటారు ఉత్పత్తి చేసే బ్యాక్ ఇఎమ్ఎఫ్ (ఎలక్ట్రో మోటివ్ ఫోర్స్) కూడా మైక్రోకంట్రోలర్కు హాని కలిగిస్తుంది.
అందువల్ల, DC మోటారును నేరుగా మైక్రోకంట్రోలర్కు ఇంటర్ఫేస్ చేయడం విలువైనది కాదు. కాబట్టి మోటారు డ్రైవర్ సర్క్యూట్ (L293D IC) ఉపయోగించబడుతుంది ఇంటర్ఫేస్ DC మోటర్ మరియు మైక్రోకంట్రోలర్ .
మోటార్ డ్రైవర్ (ఎల్ 293 డి)
ఎల్ 293 డి డ్యూయల్ హెచ్-బ్రిడ్జ్ మోటార్ డ్రైవర్ ఇంటిగ్రేటెడ్ సర్క్యూట్ (ఐసి). మోటారు డ్రైవర్లు తక్కువ-ప్రస్తుత నియంత్రణ సిగ్నల్ తీసుకొని అధిక-ప్రస్తుత సిగ్నల్ను అందిస్తున్నందున ప్రస్తుత యాంప్లిఫైయర్లుగా పనిచేస్తాయి. మోటార్లు నడపడానికి ఈ అధిక ప్రస్తుత సిగ్నల్ ఉపయోగించబడుతుంది. L293D రెండు అంతర్నిర్మిత H- బ్రిడ్జ్ డ్రైవర్ సర్క్యూట్లను కలిగి ఉంది . దాని సాధారణ ఆపరేషన్ మోడ్లో, రెండు DC మోటార్లు ఒకేసారి ముందుకు మరియు రివర్స్ దిశలో నడపబడతాయి. పిన్స్ 2 & 7 మరియు 10 & 15 వద్ద ఇన్పుట్ లాజిక్ ద్వారా రెండు మోటారుల మోటారు కార్యకలాపాలను నియంత్రించవచ్చు.
ఇన్పుట్ లాజిక్ 00 లేదా 11 సంబంధిత మోటారును ఆపివేస్తుంది. లాజిక్ 01 మరియు 10 వరుసగా సవ్యదిశలో మరియు యాంటిక్లాక్వైస్ దిశలలో తిరుగుతాయి. మోటార్లు పనిచేయడం ప్రారంభించడానికి పిన్స్ 1 మరియు 9 (రెండు మోటారులకు అనుగుణంగా) ఎనేబుల్ చేయాలి. ఎనేబుల్ ఇన్పుట్ ఎక్కువగా ఉన్నప్పుడు, అనుబంధ డ్రైవర్ ప్రారంభించబడుతుంది.
ఫలితంగా, అవుట్పుట్లు చురుకుగా మారతాయి మరియు వాటి ఇన్పుట్లతో దశలో పనిచేస్తాయి. అదేవిధంగా, ఎనేబుల్ ఇన్పుట్ తక్కువగా ఉన్నప్పుడు, ఆ డ్రైవర్ నిలిపివేయబడుతుంది మరియు వాటి అవుట్పుట్లు ఆఫ్ మరియు హై-ఇంపెడెన్స్ స్థితిలో ఉంటాయి. L293D IC యొక్క పిన్ రేఖాచిత్రం మరియు అంతర్గత నిర్మాణం క్రింద చూపించబడ్డాయి.

పిన్ రేఖాచిత్రం మరియు L293D IC యొక్క అంతర్గత నిర్మాణం
Android అంటే ఏమిటి?
ది Android ఆపరేటింగ్ సిస్టమ్ లైనక్స్ ఆధారంగా పనిచేస్తుంది, ఇది ప్రధానంగా టచ్స్క్రీన్ మొబైల్ పరికరాలైన స్మార్ట్ ఫోన్లు మరియు టాబ్లెట్ కంప్యూటర్ల కోసం రూపొందించబడింది. ఈ రోజుల్లో ఎక్కువగా ఉపయోగించే మొబైల్ OS లో ఒకటి Android. ఆండ్రాయిడ్ అనేది కాలిఫోర్నియాలోని పాలో ఆల్టోలో 2003 లో స్థాపించబడిన సాఫ్ట్వేర్.

Android మొబైల్
ఆండ్రాయిడ్ శక్తివంతమైన ఆపరేటింగ్ సిస్టమ్ మరియు ఇది స్మార్ట్ఫోన్లలో పెద్ద సంఖ్యలో అనువర్తనాలకు మద్దతు ఇస్తుంది. ఈ అనువర్తనాలు వినియోగదారులకు మరింత సౌకర్యవంతంగా మరియు అధునాతనమైనవి. Android సాఫ్ట్వేర్కు మద్దతిచ్చే హార్డ్వేర్ ఆధారపడి ఉంటుంది ARM ఆర్కిటెక్చర్ ప్లాట్ఫాం .
Android అనేది ఓపెన్ సోర్స్ ఆపరేటింగ్ సిస్టమ్ అంటే అది ఉచితం మరియు ఎవరైనా దీన్ని ఉపయోగించవచ్చు. మీ జీవితాన్ని ఒకటి లేదా మరొక విధంగా నిర్వహించడానికి మీకు సహాయపడే మిలియన్ల అనువర్తనాలు Android కి లభించాయి మరియు ఆండ్రాయిడ్ చాలా ప్రజాదరణ పొందిన కారణాల వల్ల ఇది మార్కెట్లో తక్కువ ఖర్చుతో లభిస్తుంది.
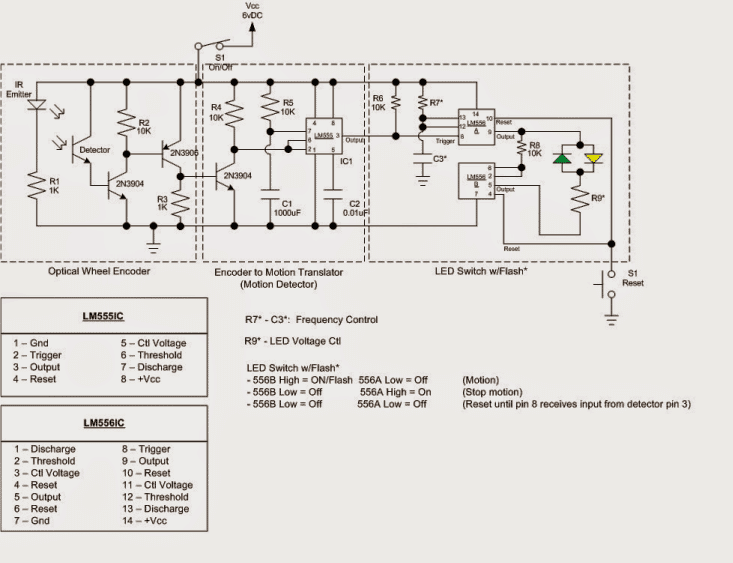
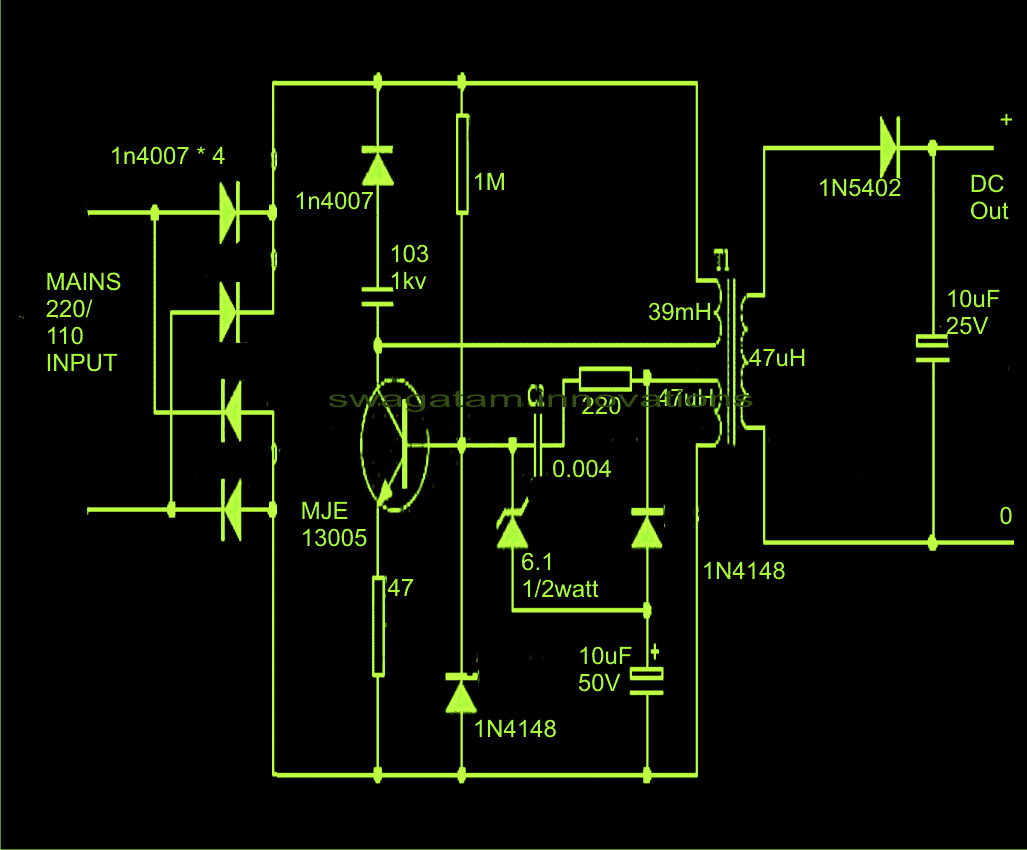
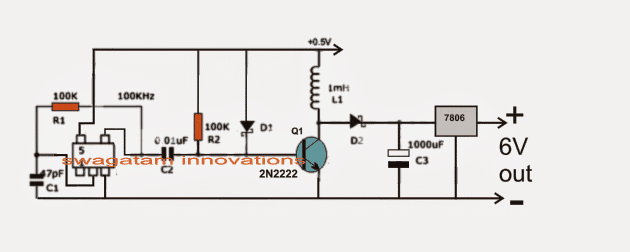
స్కీమాటిక్ రేఖాచిత్రం DC మోటార్ యొక్క వేగ నియంత్రణ యొక్క వివరణ
DC మోటార్ స్పీడ్ కంట్రోల్ సర్క్యూట్ మరియు ఆపరేషన్ వివరణ యొక్క స్కీమాటిక్ రేఖాచిత్రం క్రింద ఇవ్వబడింది.

బొమ్మ నమునా
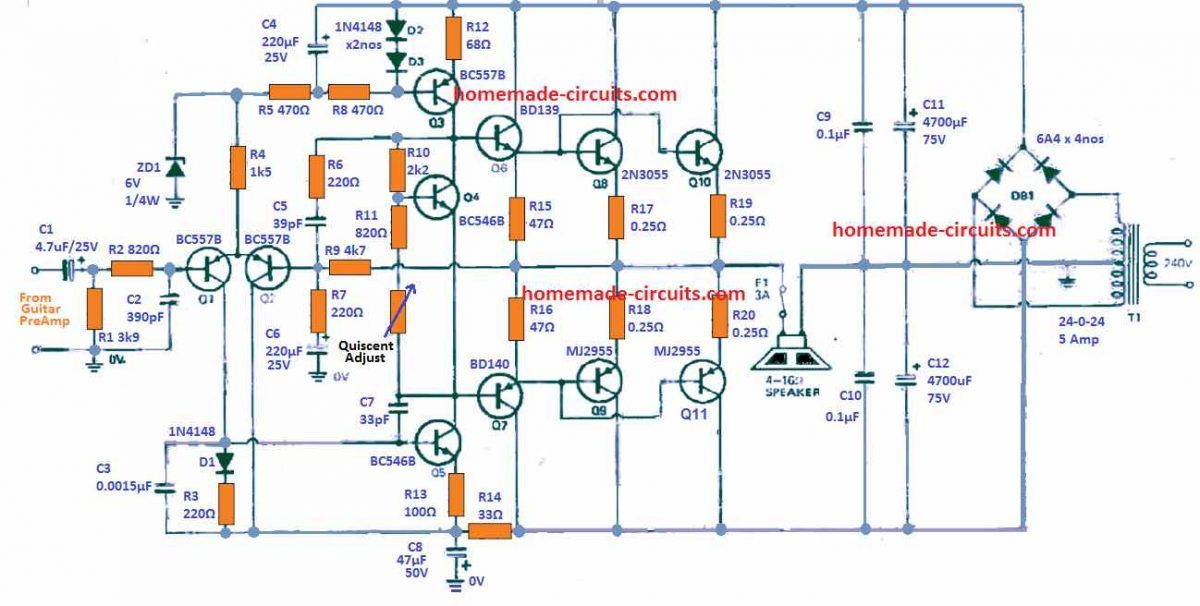
సర్క్యూట్ 230V నుండి 12V వరకు స్టెప్-డౌన్ ట్రాన్స్ఫార్మర్ మరియు 4 డయోడ్లతో కూడిన ప్రామాణిక విద్యుత్ సరఫరాను ఉపయోగిస్తుంది, ఇది వంతెన రెక్టిఫైయర్ను ఏర్పరుస్తుంది, ఇది పల్సేటింగ్ డిసిని అందిస్తుంది, తరువాత దీనిని ఫిల్టర్ చేస్తుంది విద్యుద్విశ్లేషణ కెపాసిటర్ 470µF నుండి 1000µF వరకు.
ఫిల్టర్ చేయబడిన డిసి క్రమబద్ధీకరించబడనిది, ఐసి ఎల్ఎమ్ 7805 దాని పిన్ నెం 3 వద్ద 5 వి డిసి స్థిరాంకం పొందడానికి ఉపయోగించబడుతుంది.
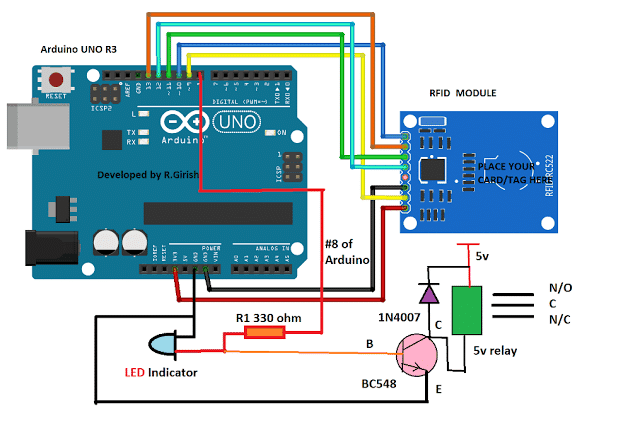
Android పరికరం నుండి నియంత్రణ సిగ్నల్ బ్లూటూత్ ద్వారా పంపబడుతుంది. ఈ సిగ్నల్ రెండు పరికరాల ట్రాన్స్మిటర్ మరియు రిసీవర్ సహాయంతో మైక్రోకంట్రోలర్తో కమ్యూనికేట్ చేయబడుతుంది. ఈ సిగ్నల్ మోటారు యొక్క వేగం మరియు దిశను నియంత్రించే ఒకే అక్షరం ద్వారా సూచించబడుతుంది.
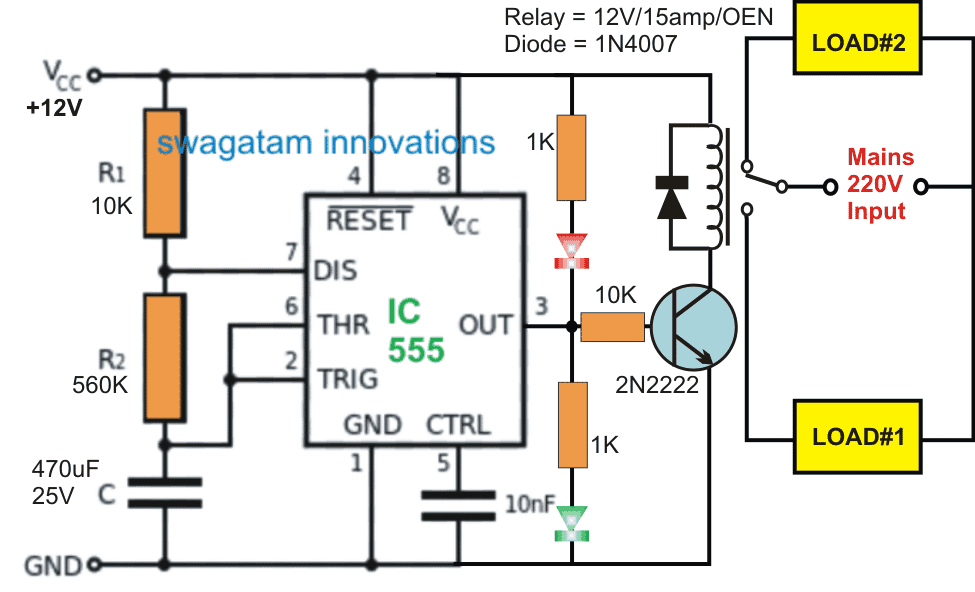
డిసి మోటారు వేగాన్ని ఎలా నియంత్రించాలి? ఈ ప్రాజెక్టులో, పప్పుధాన్యాల విధి చక్రం పెంచడానికి మరియు తగ్గించడానికి L293D యొక్క పిన్ 1 ను ప్రారంభించడానికి ప్రోగ్రామ్ చేసిన మైక్రోకంట్రోలర్ నుండి PWM పప్పులు ఉత్పత్తి చేయబడతాయి. ఈ డ్యూటీ పప్పులు డిసి మోటారును నిర్దిష్ట వేగంతో సరైన దిశలో నడపడానికి దారితీస్తాయి.
పల్స్ వెడల్పు మాడ్యులేషన్
పల్స్ వెడల్పు మాడ్యులేషన్ మైక్రో కంట్రోలర్ యొక్క అవుట్పుట్ నుండి సాధించబడుతుంది, ఇది బ్లూటూత్ పరికరం ద్వారా అందుకున్న డేటాను తీసుకోవటానికి తగిన విధంగా ప్రోగ్రామ్ చేయబడింది. ఒక బ్లూటూత్ మాడ్యూల్ ద్వి-దిశాత్మక డేటా ప్రవాహం కోసం మైక్రోకంట్రోలర్కు తగిన విధంగా ఇంటర్ఫేస్ చేయబడుతుంది, అయితే PWM పప్పులను అభివృద్ధి చేయడానికి ప్రోగ్రామ్ అమలు అవుతుంది.
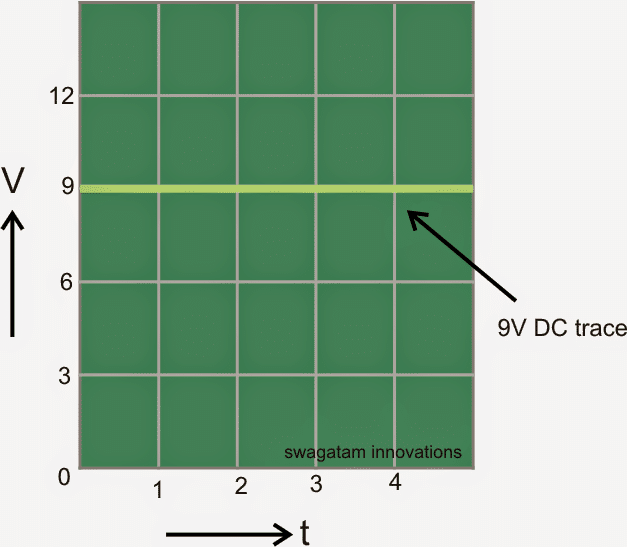
ఏదైనా స్మార్ట్ ఫోన్ నుండి ఆండ్రాయిడ్ అప్లికేషన్ ఫోన్ యొక్క అంతర్నిర్మిత బ్లూటూత్ ద్వారా బ్లూటూత్ మాడ్యూల్కు కమ్యూనికేట్ చేస్తుంది, ఇది అవసరమైన విధంగా ఆపరేషన్ల కోసం మైక్రోకంట్రోలర్కు అనుసంధానించబడి ఉంటుంది. పల్స్ వెడల్పు మాడ్యులేషన్ డ్యూటీ చక్రం క్రింద చూపబడింది.

పిడబ్ల్యుఎం డ్యూటీ సైకిల్
ఆండ్రాయిడ్ ప్రోగ్రామ్ను నడుపుతున్న స్మార్ట్ ఫోన్లోని అప్ టచ్ బటన్ పిడబ్ల్యుఎం యొక్క ఆన్ టైమ్ డ్యూటీ సైకిల్ను పెంచడానికి ఉపయోగించబడుతుంది, అయితే డౌన్ టచ్ బటన్ డ్యూటీ సైకిల్ను తగ్గించడానికి.

DC మోటార్ స్పీడ్ కంట్రోల్ కోసం Android అప్లికేషన్
ది DC మోటార్ వేగవంతమైన నియంత్రణ కోసం మైక్రో కంట్రోలర్ నుండి L293D యొక్క పిన్ -1 ను ఎనేబుల్ చెయ్యడానికి వివిధ డ్యూటీ సైకిల్తో L293D మోటారు డ్రైవర్ IC ద్వారా నడుస్తుంది. మోటారు నడుస్తున్న వేగం యొక్క శాతాన్ని ప్రదర్శించడానికి మైక్రోకంట్రోలర్కు అనుసంధానించబడిన ఎల్సిడి డేటా పిన్లు.
అందువల్ల ఆండ్రాయిడ్ అప్లికేషన్ ఉపయోగించి డిసి మోటర్ యొక్క వేగ నియంత్రణ తక్కువ ఖర్చుతో కూడుకున్నది, ఆచరణాత్మకమైనది మరియు శక్తిని ఆదా చేసే సురక్షితమైన మార్గం. మోటారు వేగాన్ని నియంత్రించడానికి సరళమైన పిడబ్ల్యుఎం (పల్స్ వెడల్పు మాడ్యులేషన్) పద్ధతిని ఉపయోగించవచ్చు. వేవ్ యొక్క విధి చక్రం దాని వేగాన్ని నియంత్రిస్తుంది. అవుట్పుట్ పోర్టులను పరస్పరం మార్చుకోవడం ద్వారా, ఇది మోటారు దిశను సమర్థవంతంగా మారుస్తుంది.
ఇంకా, ఈ వ్యాసానికి సంబంధించిన ఏవైనా ప్రశ్నలు దయచేసి దిగువ వ్యాఖ్య విభాగంలో వ్యాఖ్యానించడం ద్వారా మీ విలువైన సలహాలను ఇవ్వండి. ఇక్కడ మీ కోసం ఒక ప్రశ్న ఉంది, మైక్రోకంట్రోలర్కు DC మోటార్ ఇంటర్ఫేస్ యొక్క అనువర్తనాలు ఏమిటి?