ప్రత్యామ్నాయ ఇన్పుట్ ట్రిగ్గర్ల ద్వారా అనుసంధానించబడిన మోటారును సవ్యదిశలో మరియు యాంటిక్లాక్వైస్ దిశలలో పనిచేయడానికి అనుమతించే సర్క్యూట్ను ద్వి దిశాత్మక నియంత్రిక సర్క్యూట్ అంటారు.
దిగువ మొదటి డిజైన్ IC LM324 నుండి 4 ఒపాంప్లను ఉపయోగించి పూర్తి వంతెన లేదా H వంతెన ఆధారిత ద్వి దిశాత్మక మోటార్ కంట్రోలర్ సర్క్యూట్ను చర్చిస్తుంది. రెండవ వ్యాసంలో ఐసి 556 ను ఉపయోగించి అధిక టార్క్ బైడైరెక్షనల్ మోటార్ కంట్రోలర్ సర్క్యూట్ గురించి తెలుసుకుంటాము
పరిచయం
సాధారణంగా, యాంత్రిక స్విచ్లు DC మోటారు యొక్క భ్రమణ దిశను సర్దుబాటు చేయడానికి అలవాటు పడ్డారు. ఉపయోగించిన వోల్టేజ్ యొక్క ధ్రువణతను సర్దుబాటు చేయడం మరియు మోటారు వ్యతిరేక దిశలో తిరుగుతుంది!
ఒక వైపు వోల్టేజ్ యొక్క ధ్రువణతను మార్చడానికి DPDT స్విచ్ జోడించాల్సిన లోపం దీనికి ఉండవచ్చు, కాని మేము ఒక స్విచ్తో మాత్రమే వ్యవహరించాము, ఇది ప్రక్రియను చాలా సులభం చేస్తుంది.
అయినప్పటికీ DPDT కి ఒక తీవ్రమైన సమస్య ఉండవచ్చు, మీరు దాని భ్రమణ కదలిక సమయంలో DC మోటారుపై వోల్టేజ్ను అకస్మాత్తుగా విలోమం చేయమని సిఫార్సు చేయబడలేదు. ఇది ప్రస్తుత స్పైక్కు దారితీయవచ్చు, ఇది అనుబంధ వేగం నియంత్రికను బర్న్ చేస్తుంది.
ఇంకా, ఎలాంటి యాంత్రిక ఒత్తిడి కూడా ఇలాంటి సమస్యలను తెస్తుంది. ఈ సర్క్యూట్ ఈ సమస్యలను సులభంగా కొడుతుంది. ఏకాంత పొటెన్షియోమీటర్ సహాయంతో దిశ మరియు వేగం మార్చబడుతుంది. కుండను నిర్దేశిత దిశలో తిప్పడం వలన మోటారు తిరగడం ప్రారంభమవుతుంది.
కుండను వ్యతిరేక దిశలో మార్చడం మోటారును రివర్స్ మోషన్లో తిప్పడానికి వీలు కల్పిస్తుంది. కుండపై మధ్య స్థానం మోటారును ఆపివేస్తుంది, మోటారు మొదట మందగించి, దిశను మార్చడానికి ప్రయత్నం చేయడానికి ముందే ఆగిపోతుంది.
సాంకేతిక వివరములు
వోల్టేజ్: సర్క్యూట్ మరియు మోటారు సాధారణ విద్యుత్ సరఫరాను ఉపయోగించుకుంటాయి. ఇది అత్యధికంగా పనిచేసే వోల్టేజ్ ఎందుకంటే ఇది సూచిస్తుంది LM324 32VDC ఇది మోటారును ఆపరేట్ చేయగల గరిష్ట వోల్టేజ్ అవుతుంది.
ప్రస్తుత: IRFZ44 MOSFET 49A కోసం రూపొందించబడింది IRF4905 74A ని నిర్వహించగలదు. అయినప్పటికీ, మోస్ఫెట్ పిన్స్ నుండి స్క్రూ టెర్మినల్ బ్లాక్ వరకు నడిచే పిసిబి ట్రాక్లు కేవలం 5A గురించి నిర్వహించగలవు. పిసిబి ట్రాక్లపై రాగి తీగ ముక్కలను టంకం చేయడం ద్వారా దీనిని మెరుగుపరచవచ్చు.
అలాంటప్పుడు MOSFET లు చాలా వేడిగా ఉండకుండా చూసుకోండి - అవి చేస్తే ఈ పరికరాల్లో పెద్ద హీట్సింక్లు అమర్చడం అవసరం.
LM324 పిన్అవుట్లు

LM324 ను ఉపయోగించే DC మోటర్స్ యొక్క ద్వి నియంత్రణ నియంత్రణ
ప్రాథమికంగా, మీరు 3 మార్గాలను కనుగొంటారు DC మోటార్లు వేగాన్ని సర్దుబాటు చేయండి :
1. ఆదర్శ త్వరణాన్ని సాధించడానికి యాంత్రిక గేర్లను ఉపయోగించడం ద్వారా: ఈ విధానం తరచుగా ఇంటి వర్క్షాప్లలో ప్రాక్టీస్ చేసే enthusias త్సాహికుల సౌలభ్యం కంటే ఎక్కువగా ఉంటుంది.
రెండు. సిరీస్ రెసిస్టర్ ద్వారా మోటార్ వోల్టేజ్ తగ్గించడం. ఇది ఖచ్చితంగా అసమర్థంగా ఉంటుంది (శక్తి రెసిస్టర్లో వెదజల్లుతుంది) మరియు టార్క్ తగ్గుతుంది.
మోటారుపై లోడ్ పెరిగేకొద్దీ మోటారు వినియోగించే కరెంట్ కూడా పెరుగుతుంది. పెరిగిన కరెంట్ అంటే సిరీస్ రెసిస్టర్పై ఎక్కువ వోల్టేజ్ డ్రాప్ మరియు మోటారుకు పడిపోయిన వోల్టేజ్.
మోటారు అప్పుడు ఎక్కువ మొత్తంలో కరెంట్ను లాగడానికి ప్రయత్నిస్తుంది, దీనివల్ల మోటారు నిలిచిపోతుంది.
3. చిన్న పప్పులలో మోటారుకు మొత్తం సరఫరా వోల్టేజ్ను వర్తింపజేయడం ద్వారా: ఈ పద్ధతి సిరీస్ డ్రాపింగ్ ప్రభావాన్ని తొలగిస్తుంది. దీనిని పల్స్ వెడల్పు మాడ్యులేషన్ (పిడబ్ల్యుఎం) గా సూచిస్తారు మరియు ఇది ఈ సర్క్యూట్లో కనిపించే వ్యూహం. త్వరిత పప్పులు మోటారు నెమ్మదిగా విస్తరించడానికి అనుమతిస్తుంది పప్పులు మోటారు మరింత వేగంగా నడుస్తాయి.

ఇది ఎలా పని చేస్తుంది (స్కీమాటిక్ చూడండి)
సర్క్యూట్ను నాలుగు దశలుగా విభజించవచ్చు:
1. మోటార్ నియంత్రణ - ఐసి 1: ఎ
2. ట్రయాంగిల్ వేవ్ జెనరేటర్ - ఐసి 1: బి
3. వోల్టేజ్ కంపారిటర్లు - ఐసి 1: సి మరియు డి
4. మోటార్ డ్రైవ్ - క్యూ 3-6
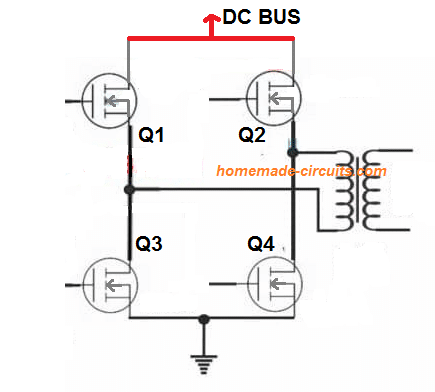
మోస్ఫెట్స్ Q3-6 చుట్టూ కేంద్రీకృతమై ఉన్న మోటారు డ్రైవర్ దశతో ప్రారంభిద్దాం. ఈ MOSFET లలో కొన్ని మాత్రమే ఏ సమయంలోనైనా సక్రియం చేయబడిన స్థితిలో ఉంటాయి. Q3 మరియు Q6 మోటారు ద్వారా ప్రస్తుత కదలికలలో ఉన్నప్పుడు మరియు అది ఒకే దిశలో తిరగడానికి కారణమవుతుంది.
క్యూ 4 మరియు క్యూ 5 ఆపరేటింగ్ కండిషన్లో ఉన్న వెంటనే ప్రస్తుత ప్రసరణ తారుమారై మోటారు వ్యతిరేక దిశలో తిరగడం ప్రారంభిస్తుంది. IC1: C మరియు IC1: D ఒప్పందం MOSFET లను ఆన్ చేస్తుంది.
ఓపాంప్స్ IC1: C మరియు IC1: D వోల్టేజ్ కంపారిటర్లుగా వైర్ చేయబడతాయి. ఈ ఒపాంప్స్ కోసం రిఫరెన్స్ వోల్టేజ్ R6, R7 మరియు R8 యొక్క రెసిస్టర్ వోల్టేజ్ డివైడర్ ద్వారా ఉత్పత్తి అవుతుంది.
IC1: D కొరకు రిఫరెన్స్ వోల్టేజ్ ‘+’ ఇన్పుట్తో జతచేయబడిందని గమనించండి, కాని IC1: C కొరకు ఇది ‘-‘ ఇన్పుట్తో జతచేయబడుతుంది.
దీని అర్థం IC1: D దాని సూచన కంటే ఎక్కువ వోల్టేజ్తో సక్రియం చేయబడుతుంది, అయితే IC1: C దాని సూచన కంటే తక్కువ వోల్టేజ్తో ప్రాంప్ట్ చేయబడుతుంది. ఓపాంప్ IC1: B ఒక త్రిభుజం వేవ్ జెనరేటర్గా కాన్ఫిగర్ చేయబడింది మరియు సంబంధిత వోల్టేజ్ కంపారిటర్లకు యాక్టివేషన్ సిగ్నల్ను సరఫరా చేస్తుంది.
పౌన frequency పున్యం సుమారుగా R5 మరియు C1 - 270Hz యొక్క సమయ స్థిరాంకం యొక్క విలోమం.
R5 లేదా C1 ను తగ్గించడం వల్ల ఫ్రీక్వెన్సీ పెరుగుతుంది, వీటిలో ఒకటి ఫ్రీక్వెన్సీని తగ్గిస్తుంది. త్రిభుజం తరంగం యొక్క పీక్-టు-పీక్ అవుట్పుట్ స్థాయి రెండు వోల్టేజ్ సూచనల మధ్య వ్యత్యాసం కంటే చాలా తక్కువ.
అందువల్ల రెండు పోలికలు ఒకే సమయంలో సక్రియం చేయడం చాలా కష్టం. లేకపోతే మొత్తం 4 MOSFET లు నిర్వహించడం ప్రారంభిస్తాయి, ఇది షార్ట్ సర్క్యూట్కు దారితీస్తుంది మరియు అవన్నీ నాశనం చేస్తుంది.
త్రిభుజం తరంగ రూపం DC ఆఫ్సెట్ వోల్టేజ్ చుట్టూ నిర్మించబడింది. ఆఫ్సెట్ వోల్టేజ్ను పెంచడం లేదా తగ్గించడం త్రిభుజం వేవ్ యొక్క పల్స్ స్థానానికి తగిన విధంగా మారుతుంది.
త్రిభుజం తరంగాన్ని పైకి మార్చడం కంపారిటర్ IC1: D ని సక్రియం చేయడానికి అనుమతిస్తుంది, ఇది తగ్గడం తగ్గుతుంది, దీని ఫలితంగా కంపారిటర్ IC1: C సక్రియం అవుతుంది. త్రిభుజం తరంగం యొక్క వోల్టేజ్ స్థాయి రెండు వోల్టేజ్ సూచనల మధ్యలో ఉన్నప్పుడు, పోలికలు ఏవీ ప్రేరేపించబడవు. DC ఆఫ్సెట్ వోల్టేజ్ IC1: A ద్వారా పొటెన్షియోమీటర్ P1 చే నియంత్రించబడుతుంది, ఇది వోల్టేజ్ అనుచరుడిగా రూపొందించబడింది.
ఇది తక్కువ అవుట్పుట్ ఇంపెడెన్స్ వోల్టేజ్ మూలాన్ని ఇస్తుంది, DC ఆఫ్సెట్ వోల్టేజ్ IC1: B యొక్క లోడింగ్ ప్రభావానికి తక్కువ హాని కలిగిస్తుంది.
‘కుండ’ మారినప్పుడు, DC ఆఫ్సెట్ వోల్టేజ్ కుండ పల్టీలు కొట్టిన దిశ ఆధారంగా పైకి లేదా క్రిందికి మారుతూ ఉంటుంది. డయోడ్ D3 నియంత్రిక కోసం రివర్స్ ధ్రువణత భద్రతను అందిస్తుంది.
రెసిస్టర్ R15 మరియు కెపాసిటర్ సి 2 సాధారణ తక్కువ పాస్ ఫిల్టర్. మోటారుకు సరఫరా శక్తిని ఆన్ చేసేటప్పుడు MOSFET లు తీసుకువచ్చే వోల్టేజ్ స్పైక్లను శుభ్రం చేయడానికి ఇది ఉద్దేశించబడింది.
భాగాల జాబితా

2) ఐసి 556 ఉపయోగించి ద్వి దిశాత్మక మోటార్ కంట్రోల్
DC మోటారుల వేగం మరియు ద్వి దిశాత్మక నియంత్రణ అమలు చేయడానికి చాలా సులభం. స్వతంత్రంగా శక్తినిచ్చే మోటారుల కోసం, వేగం సూత్రప్రాయంగా, శాశ్వత అయస్కాంతం కలిగిన సరఫరా వోల్టేజ్ యొక్క సరళ విధి స్వతంత్రంగా శక్తినిచ్చే మోటారుల యొక్క ఉప-వర్గం, మరియు అవి తరచుగా బొమ్మలు మరియు నమూనాలలో ఉపయోగించబడతాయి.
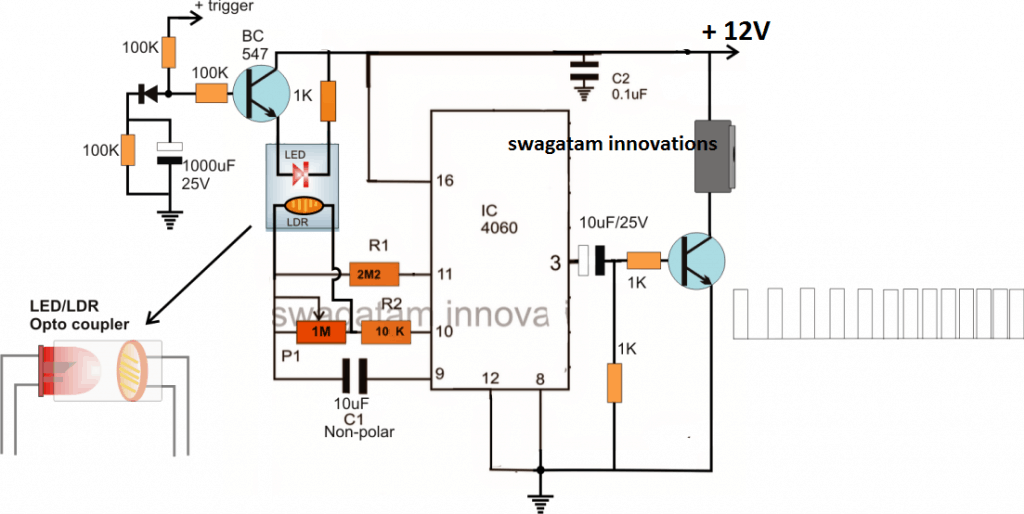
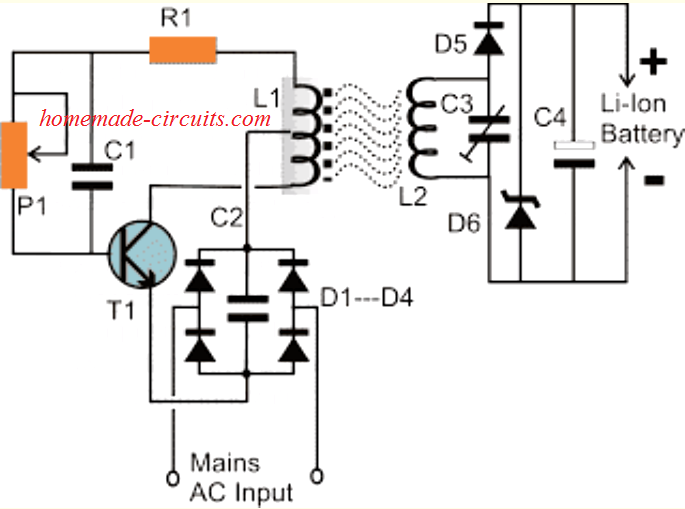
ఈ సర్క్యూట్లో, మోటారు సరఫరా వోల్టేజ్ పల్స్ వెడల్పు మాడ్యులేషన్ (పిడబ్ల్యుఎం) ద్వారా వైవిధ్యంగా ఉంటుంది, ఇది మంచి సామర్థ్యాన్ని మరియు తక్కువ మోటారు వేగంతో అధిక టార్క్ను నిర్ధారిస్తుంది. సింగిల్ కంట్రోల్ వోల్టేజ్ he- ట్వీన్ 0 మరియు +10 V మోటారు వేగాన్ని తిప్పికొట్టడానికి మరియు రెండు దిశలలో గరిష్టంగా మారుతూ ఉంటుంది.
అస్టేబుల్ మల్టీవైబ్రేటర్ IC 80 Hz ఓసిలేటర్గా ఏర్పాటు చేయబడింది మరియు PWM సిగ్నల్ యొక్క ఫ్రీక్వెన్సీని నిర్ణయిస్తుంది. ప్రస్తుత మూలం T1 ఛార్జీలు Ca. ఈ కెపాసిటర్లోని సాటూత్ వోల్టేజ్ 1C2 లోని కంట్రోల్ వోల్టేజ్తో పోల్చబడింది, ఇది N1-Na లేదా NPN1 ను బఫర్ చేయడానికి PWM సిగ్నల్ను అందిస్తుంది. డార్లింగ్టన్ ఆధారిత మోటారు డ్రైవర్ 4 ఆంప్స్ వరకు లోడ్లు నడపగల ఒక వంతెన సర్క్యూట్, రన్-ఇన్ కరెంట్ 5 ఆంప్స్ కంటే తక్కువగా ఉండి, పవర్ ట్రాన్సిస్టర్స్ టి 1-టిలకు తగినంత శీతలీకరణ అందించబడుతుంది. డయోడ్లు డి 1, డి 5 మోటారు స్విచ్ ఎస్ 1 నుండి ప్రేరేపిత సర్జెస్ నుండి రక్షణను కలిగి ఉంటాయి, మోటారు దిశను తక్షణమే రివర్స్ చేయడం సాధ్యపడుతుంది.

ప్రోటోటైప్ చిత్రాలు



మునుపటి: యాంప్లిఫైయర్ సర్క్యూట్లను అర్థం చేసుకోవడం తర్వాత: ట్రాన్సిస్టర్లను (బిజెటి) మరియు మోస్ఫెట్ను ఆర్డునోతో ఎలా కనెక్ట్ చేయాలి