ఆధునిక ప్రపంచంలో, రోబోట్ ఒక ముఖ్యమైన పాత్ర పోషిస్తుంది . రోబోట్ యొక్క ముఖ్య ఉద్దేశ్యం మనిషి శక్తిని తగ్గించడం. రోబోట్లను అనేక అనువర్తనాల్లో ఎలక్ట్రానిక్స్లో ఉపయోగిస్తారు. ఈ వ్యాసంలో ఆర్డునో మాడ్యూల్ & 8051 మైక్రోకంట్రోలర్తో రోబోను ఎలా నిర్మించాలో చర్చించాము. ఆర్డునోతో రోబోను నిర్మించడానికి మేము అడ్డంకి ఎగవేతతో ఆర్డునో రోబోట్ గురించి వివరిస్తున్నాము. అవసరమైన భాగాలలో రోబోట్ బాడీ, డిసి మోటర్, అల్ట్రాసోనిక్ సెన్సార్, ఆర్డునో మాడ్యూల్, మోటార్ డ్రైవర్ ఐసి మరియు ఆర్డునో మాడ్యూల్ ఉన్నాయి
రోబోట్ ఎలా నిర్మించాలి?
ది అవసరమైన భాగాలు రోబోట్ నిర్మించడానికి ఈ క్రిందివి ఉన్నాయి
రోబోట్ బాడీ
యొక్క ప్రాథమిక రోబోట్ బాడీ అడ్డంకి ఎగవేత యొక్క రోబోట్ కింది చిత్రంలో చూపబడింది. రోబోట్ బాడీ ఒక ప్లాస్టిక్ బాడీ మరియు ఇది రెండు వైపులా చక్రాలను కలిగి ఉంటుంది. రోబోట్ బాడీ ముందు అల్ట్రాసోనిక్ సెన్సార్ ఏర్పాటు చేయబడింది. అల్ట్రాసోనిక్ సెన్సార్ను ఉపయోగించడం ద్వారా అడ్డంకిని గుర్తించవచ్చు. రోబోట్ కదులుతున్నప్పుడు, అల్ట్రాసోనిక్ సెన్సార్ ద్వారా ఏదైనా అడ్డంకిని గుర్తించినట్లయితే రోబోట్ పక్కకు కదులుతుంది మరియు అది కదులుతూనే ఉంటుంది.

రోబోట్ బాడీ
DC మోటార్
ది DC మోటారు ఎలక్ట్రిక్ మోటారు మరియు ఇది ప్రత్యక్ష విద్యుత్తుపై నడుస్తుంది. ఏదైనా ఎలక్ట్రిక్ మోటారు యొక్క ఆపరేషన్ విద్యుదయస్కాంతత్వంపై ఆధారపడి ఉంటుంది. అయస్కాంత క్షేత్రం బాహ్య అయస్కాంత క్షేత్రంలో ఉంచినప్పుడు ప్రస్తుత మోస్తున్న కండక్టర్ ద్వారా ఉత్పత్తి అవుతుంది, ఇది కండక్టర్లోని ప్రస్తుతానికి అనులోమానుపాతంలో శక్తిని అనుభవిస్తుంది. సాధారణంగా, అయస్కాంతాలు ఉత్తరం నుండి దక్షిణానికి ధ్రువణ ఆకర్షణకు వ్యతిరేకం అని మనకు తెలుసు. ధ్రువణతలు ఉత్తరం నుండి ఉత్తరం మరియు దక్షిణాన దక్షిణాన ఉంటాయి, అప్పుడు అయస్కాంతాలు తిప్పికొట్టబడతాయి.

DC మోటార్
DC మోటారు యొక్క అంతర్గత కాన్ఫిగరేషన్ కదలికను ఉత్పత్తి చేయడానికి ప్రస్తుత మోస్తున్న కండక్టర్ మరియు బాహ్య అయస్కాంత క్షేత్రం మధ్య అయస్కాంత పరస్పర చర్యను అటాచ్ చేయడానికి రూపొందించబడింది. దీనిలో మేము రెండు డిసి మోటార్లు ఉపయోగిస్తున్నాము, ప్రతి మోటారులో 6 వి మరియు మొత్తం రెండు డిసి మోటార్లు 12 వి కలిగి ఉంటాయి. రెండు DC మోటార్లు రోబోట్ బాడీలో ఉంచబడ్డాయి, వీటిని మనం ఈ క్రింది చిత్రంలో గమనించవచ్చు. రోబోట్ బాడీని DC మోటార్లు సహాయంతో తరలించారు

DC మోటారుతో రోబోట్ బాడీ
ఆర్డునో మాడ్యూల్
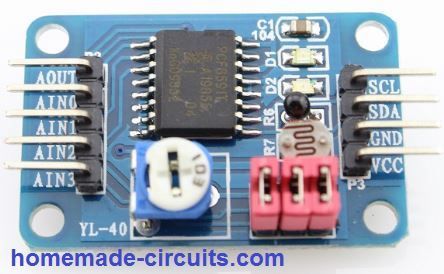
కింది చిత్రం arduino మాడ్యూల్ చిత్రాన్ని చూపిస్తుంది. ది arduino మాడ్యూల్ ఆర్డునో కిట్ ఉపయోగించి అడ్డంకి ఎగవేత రోబోట్ రూపకల్పనలో ముఖ్యమైన పాత్ర పోషిస్తుంది. ఆర్డునో యొక్క రిసీవర్ పిన్ అల్ట్రాసోనిక్ సెన్సార్ యొక్క రెండవ పిన్తో అనుసంధానించబడి ఉంది మరియు 1 వ, 2 వ, మరియు 3 వ పిన్ ఆర్డునో మాడ్యూల్ DC మోటారు డ్రైవర్కు అనుసంధానించబడి ఉంది. సాధారణ భాగాలు కెపాసిటర్ మరియు డయోడ్ కూడా బ్యాటరీ విద్యుత్ సరఫరా సహాయంతో ఆర్డునో మాడ్యూల్కు అనుసంధానించబడి ఉన్నాయి.

ఆర్డునో మాడ్యూల్
మోటార్ డ్రైవర్ ఐసి
DC మోటారును నడపడానికి మోటారు డ్రైవర్ IC ఉపయోగించబడిన. మోటారు డ్రైవర్ యొక్క పిన్స్ 3,6 & 11, 14 డిసి మోటారుకు అనుసంధానించబడి ఉన్నాయి. ఇన్పుట్ పిన్ 1 మరియు 2 ఆర్డునో మాడ్యూల్కు అనుసంధానించబడి ఉన్నాయి మరియు ఎనేబుల్ పిన్ ఆర్డునో యొక్క ట్రాన్స్మిటర్ పిన్కు అనుసంధానించబడి ఉంది. మోటారు డ్రైవర్ యొక్క 4, 5, 12, 13 పిన్స్ భూమికి అనుసంధానించబడి ఉన్నాయి.

మోటార్ డ్రైవర్ ఐసి
అల్ట్రాసోనిక్ సెన్సార్
ఈ భావనలో అల్ట్రాసోనిక్ సెన్సార్ ముందుకు అడ్డంకిని గుర్తించడానికి ఉపయోగిస్తారు మరియు ఇది ఆదేశాన్ని arduino బోర్డుకు పంపుతుంది. ఇన్పుట్ సిగ్నల్ మీద ఆధారపడి మైక్రోకంట్రోలర్ రోబోట్ను ప్రత్యామ్నాయ దిశల్లోకి మళ్ళించడానికి మళ్ళిస్తుంది.

అల్ట్రాసోనిక్ సెన్సార్
ఆర్డునో రోబోట్ అడ్డంకి ఎగవేత యొక్క అనువర్తనాలు
- ఆర్డునో రోబోట్ ఏదైనా ఉపరితలంపై కదలగలదు
- ఇది రిఫ్రిజిరేటర్ బాడీ వంటి లోహ ఉపరితలంపై కదలగలదు.
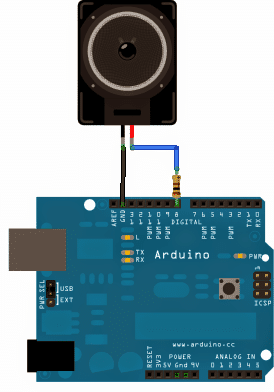
దిగువ చిత్రం అడ్డంకి ఎగవేత కోసం ఆర్డునో రోబోట్ను చూపుతుంది

అడ్డంకి ఎగవేత కోసం ఆర్డునో రోబోట్
తో రోబోట్ నిర్మించడానికి 8051 మైక్రోకంట్రోలర్ మేము మెటల్ డిటెక్టర్ రోబోట్ వాహనం గురించి వివరిస్తున్నాము. 8051 మైక్రోకంట్రోలర్తో రోబోను నిర్మించడానికి అవసరమైన భాగాలు
- 8051 మైక్రోకంట్రోలర్
- DC మోటార్లు
- మోటారు డ్రైవర్లు
- మెటల్ డిటెక్టర్
- డీకోడర్
- ఎన్కోడర్
- బటన్లను నొక్కండి
- క్రిస్టల్
- RF ట్రాన్స్మిటర్ మరియు రిసీవర్
మెటల్ డిటెక్టర్
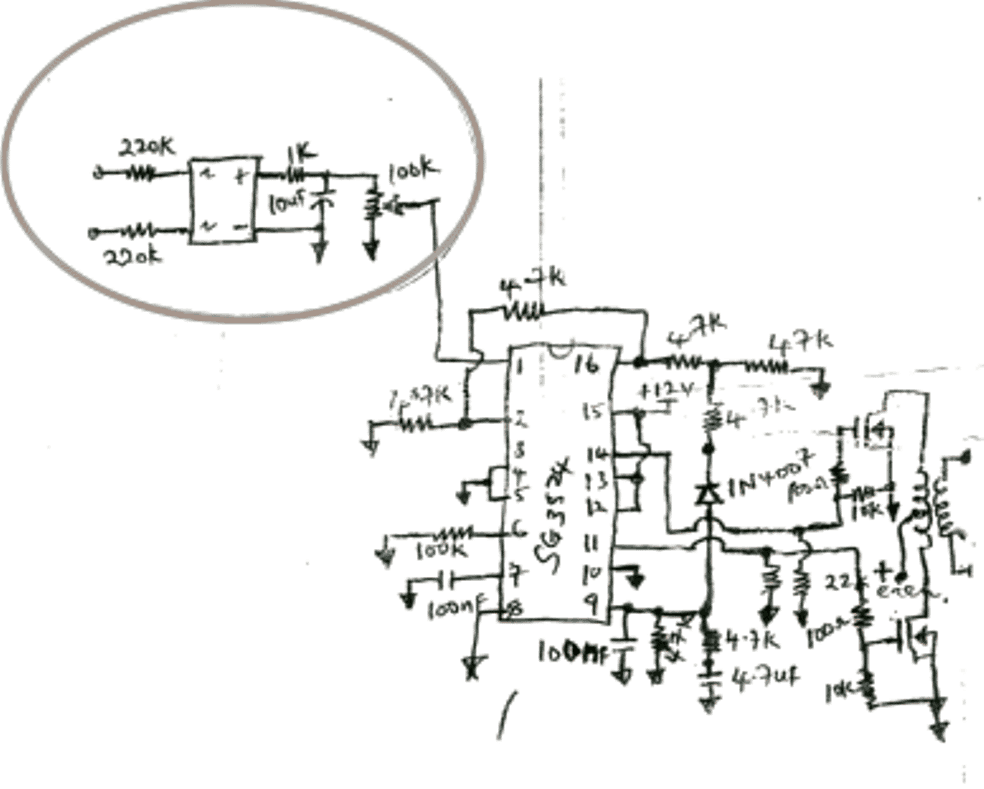
ది మెటల్ డిటెక్టర్ ఒక కాయిల్, ఇది భూమిపై లోహాలను గుర్తించడానికి ఉపయోగించే ఒకటి లేదా అంతకంటే ఎక్కువ లోహ కాయిల్స్ కలిగి ఉంటుంది. మెటల్ డిటెక్టర్ విద్యుదయస్కాంత ప్రేరణ సూత్రంపై పనిచేస్తుంది. మెటల్ డిటెక్టర్ పిసిబి ద్వారా రోబోట్ బాడీకి అనుసంధానించబడి ఉంటుంది, ఇది చివరి చిత్రంలో మనం గమనించవచ్చు. కింది చిత్రం ఎలక్ట్రానిక్ ప్రాజెక్టులలో ఉపయోగించే సాధారణ మెటల్ డిటెక్టర్ను చూపిస్తుంది.

మెటల్ డిటెక్టర్
పుష్ బటన్లు
పుష్ బటన్లు ప్లాస్టిక్ మరియు లోహం వంటి కఠినమైన లోహాలతో తయారైన బటన్లు. మైక్రోకంట్రోలర్లో ప్రోగ్రామ్ను రీసెట్ చేయడానికి సాధారణంగా పుష్ బటన్లు ఉపయోగించబడతాయి. కింది చిత్రం పుష్ బటన్ చిత్రాన్ని చూపిస్తుంది.

నొక్కుడు మీట
8051 మైక్రోకంట్రోలర్
ది 8051 మైక్రోకంట్రోలర్లో 40 పిన్లు ఉంటాయి . మైక్రోకంట్రోలర్ యొక్క 4 వ & 5 వ పిన్ క్రిస్టల్ ఓసిలేటర్కు అనుసంధానించబడి ఉంది. VC పిన్ 5V యొక్క విద్యుత్ సరఫరాకు ఇవ్వబడుతుంది మరియు గ్రౌండ్ పిన్ భూమికి అనుసంధానించబడి ఉంటుంది. మైక్రోకంట్రోలర్ యొక్క పిన్స్ 15, 16, 18, 19 HT12E యొక్క ఎన్కోడర్ IC కి అనుసంధానించబడి ఉన్నాయి. మైక్రోకంట్రోలర్ పిన్స్ 2, 7, 8, 9, పుష్ బటన్లకు అనుసంధానించబడి ఉన్నాయి.
రెసిస్టర్, కెపాసిటర్, క్రిస్టల్ ఓసిలేటర్, 8051 సిరీస్ మైక్రోకంట్రోలర్, ఎన్కోడర్లు మరియు అన్ని భాగాలను కనెక్ట్ చేసిన తరువాత క్రింది చిత్రం ఆన్లో ఉంది ప్రింటెడ్ సర్క్యూట్ బోర్డు .

పిసిబి కనెక్షన్లు
దిగువ చిత్రం 8051 సిరీస్ మైక్రోకంట్రోలర్తో మెటల్ డిటెక్టర్ రోబోట్ను చూపిస్తుంది.

8051 సిరీస్ మైక్రోకంట్రోలర్తో మెటల్ డిటెక్టర్ రోబోట్
ఈ వ్యాసంలో మేము దాని గురించి చర్చించాము ఆర్డునో మరియు 8051 మైక్రోకంట్రోలర్తో రోబోను ఎలా నిర్మించాలి . ఈ కథనాన్ని చదవడం ద్వారా మీరు రోబోను నిర్మించడానికి కొంత ప్రాథమిక జ్ఞానాన్ని పొందారని నేను ఆశిస్తున్నాను. ఈ వ్యాసం గురించి లేదా ఎలక్ట్రానిక్స్ గురించి మీకు ఏవైనా ప్రశ్నలు ఉంటే మరియు కమ్యూనికేషన్ ప్రాజెక్టులు , దయచేసి దిగువ విభాగంలో వ్యాఖ్యానించడానికి సంకోచించకండి. ఇక్కడ మీ కోసం ప్రశ్న, 8051 సిరీస్ మైక్రోకంట్రోలర్ అంటే ఏమిటి?
.