ఈ పోస్ట్లో మనం మైక్రోకంట్రోలర్లు మరియు ఐసిలతో బ్రష్ చేసిన డిసి మోటార్లు మరియు స్టెప్పర్ మోటార్లు నడపడానికి ఉపయోగపడే ఎల్ 298 ఎన్ డ్యూయల్ హెచ్-బ్రిడ్జ్ డిసి మోటార్ డ్రైవర్ మాడ్యూల్ గురించి తెలుసుకోబోతున్నాం.
అవలోకనం
ఎలక్ట్రానిక్స్ డిజైనర్లకు మాడ్యులర్ సర్క్యూట్ బోర్డులు ఉత్తమ సమయ రక్షకుడు, ఇవి ప్రోటోటైపింగ్ లోపాలను కూడా తగ్గిస్తాయి. మైక్రోకంట్రోలర్ల కోసం కోడ్ వ్రాసే ప్రోగ్రామర్లు కంప్యూటర్ ముందు సంకేతాలను టైప్ చేయడం ద్వారా ఎక్కువ సమయాన్ని వెచ్చిస్తారు మరియు వివిక్త ఎలక్ట్రానిక్ భాగాలను టంకము వేయడానికి తక్కువ సమయాన్ని కలిగి ఉంటారు.
అందువల్ల మేము టన్నులు మరియు టన్నుల వేర్వేరు మాడ్యులర్ సర్క్యూట్లను ఆర్డునో బోర్డుల కోసం మాత్రమే తయారుచేస్తాము, మా నమూనాను రూపకల్పన చేసేటప్పుడు ఇంటర్ఫేస్ చేయడం మరియు కనీసం హార్డ్వేర్ లోపాల ప్రయోజనాన్ని కలిగి ఉండటం.
L298N మాడ్యూల్ యొక్క ఉదాహరణ:

మాడ్యూల్ IC L298N చుట్టూ నిర్మించబడింది, ఇది సాధారణంగా ఇ-కామర్స్ వెబ్సైట్లలో లభిస్తుంది.
మేము వాడతాం DC మోటార్ డ్రైవర్లు ఎందుకంటే ఐసిలు మరియు మైక్రోకంట్రోలర్లు సాధారణంగా 100 మిల్లీయాంప్లకు మించని కరెంట్ను అందించగలవు. మైక్రోకంట్రోలర్లు స్మార్ట్ అయితే బలంగా లేవు ఈ మాడ్యూల్ అధిక శక్తి DC మోటార్లు నడపడానికి Arduino, IC లు మరియు ఇతర మైక్రోకంట్రోలర్లకు కొన్ని కండరాలను జోడిస్తుంది.
ఇది 2 DC మోటార్లు ఒకేసారి 2 ఆంప్స్ లేదా ఒక స్టెప్పర్ మోటారు వరకు నియంత్రించగలదు. మేము చేయవచ్చు వేగాన్ని నియంత్రించండి PWM ను ఉపయోగించడం మరియు మోటార్లు దాని భ్రమణ దిశను ఉపయోగించడం.
ఈ మాడ్యూల్ అనువైనది రోబోలను నిర్మించడం మరియు బొమ్మ కార్లు వంటి భూమి కదిలే ప్రాజెక్టులు.
L298N మాడ్యూల్ యొక్క సాంకేతిక వివరాలను చూద్దాం.

పిన్ వివరణ:
Hand ఎడమ వైపున OUT1 మరియు OUT2 పోర్ట్ ఉన్నాయి, ఇది DC మోటారును కనెక్ట్ చేయడానికి. అదేవిధంగా, మరొక DC మోటారు కోసం OUT3 మరియు OUT4.
NA ENA మరియు ENB పిన్లను ఎనేబుల్ చేస్తాయి, ENA ని అధిక లేదా + 5V కి కనెక్ట్ చేయడం ద్వారా ఇది OUT1 మరియు OUT2 పోర్ట్ను ప్రారంభిస్తుంది. మీరు ENA పిన్ను తక్కువ లేదా భూమికి కనెక్ట్ చేస్తే, ఇది OUT1 మరియు OUT2 ని నిలిపివేస్తుంది. అదేవిధంగా, ENB మరియు OUT3 మరియు OUT4 కోసం.
1 IN1 నుండి IN4 వరకు ఇన్పుట్ పిన్లు Arduino కి అనుసంధానించబడతాయి. మీరు మైక్రోకంట్రోలర్ నుండి లేదా మానవీయంగా IN1 + Ve మరియు IN2 –V ను ఇన్పుట్ చేస్తే, OUT1 అధికంగా మారుతుంది మరియు OUT2 తక్కువగా మారుతుంది, తద్వారా మేము మోటారును నడపవచ్చు.
IN మీరు IN3 అధికంగా ఇన్పుట్ చేస్తే, OUT4 అధికంగా మారుతుంది మరియు మీరు IN4 తక్కువ OUT3 తక్కువగా ఉంటే, ఇప్పుడు మేము మరొక మోటారును నడపవచ్చు.
You మీరు మోటారు యొక్క భ్రమణ దిశను రివర్స్ చేయాలనుకుంటే, IN1 మరియు IN2 ధ్రువణతను రివర్స్ చేయండి, అదేవిధంగా IN3 మరియు IN4 లకు.
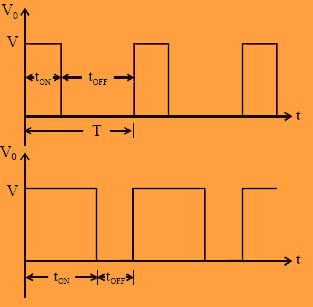
NA ENA మరియు ENB లకు PWM సిగ్నల్ను వర్తింపజేయడం ద్వారా మీరు రెండు వేర్వేరు అవుట్పుట్ పోర్ట్లలో మోటారుల వేగాన్ని నియంత్రించవచ్చు.
7 బోర్డు 7 నుండి 12V వరకు నామమాత్రంగా అంగీకరించవచ్చు. మీరు + 12V టెర్మినల్ వద్ద శక్తిని మరియు 0V కి భూమిని ఇన్పుట్ చేయవచ్చు.
5 + 5V టెర్మినల్ OUTPUT, ఇది అవసరమైతే Arduino లేదా ఏదైనా ఇతర మాడ్యూల్కు శక్తినివ్వడానికి ఉపయోగపడుతుంది.
జంపర్స్:
ఇలస్ట్రేటెడ్ చిత్రాన్ని చూడటానికి మీరు మూడు జంపర్ పిన్స్ ఉన్నాయి.
అన్ని జంపర్లు కనెక్ట్ చేయబడతాయి మొదట్లో మీ అవసరాన్ని బట్టి జంపర్ను తొలగించండి లేదా ఉంచండి.
జంపర్ 1 (ఇలస్ట్రేటెడ్ ఇమేజ్ చూడండి):
Motor మీకు మోటారుకు 12V కన్నా ఎక్కువ సరఫరా అవసరమైతే, మీరు జంపర్ 1 ను డిస్కనెక్ట్ చేసి, 12v టెర్మినల్ వద్ద కావలసిన వోల్టేజ్ (గరిష్టంగా 35V) ను వర్తింపజేయాలి. మరొకటి తీసుకురండి 5 వి సరఫరా మరియు + 5V టెర్మినల్ వద్ద ఇన్పుట్ చేయండి. అవును, మీరు 12V కన్నా ఎక్కువ దరఖాస్తు చేయవలసి వస్తే 5V ను ఇన్పుట్ చేయాలి (జంపర్ 1 తొలగించబడినప్పుడు).
V 5V ఇన్పుట్ IC యొక్క సరైన పనితీరు కోసం, ఎందుకంటే జంపర్ను తొలగించడం వలన అంతర్నిర్మిత 5v రెగ్యులేటర్ను నిలిపివేస్తుంది మరియు 12v టెర్మినల్ నుండి అధిక ఇన్పుట్ వోల్టేజ్ నుండి రక్షిస్తుంది.
Supply మీ సరఫరా 7 నుండి 12V మధ్య ఉంటే + 5V టెర్మినల్ అవుట్పుట్గా పనిచేస్తుంది మరియు మీరు 12V కన్నా ఎక్కువ వర్తింపజేస్తే ఇన్పుట్గా పనిచేస్తుంది మరియు జంపర్ తొలగించబడుతుంది.
V చాలా ప్రాజెక్టులకు 12V కన్నా తక్కువ మోటారు వోల్టేజ్ అవసరం కాబట్టి, జంపర్ను అలాగే ఉంచండి మరియు + 5 వి టెర్మినల్ను అవుట్పుట్గా ఉపయోగించండి.
జంపర్ 2 మరియు జంపర్ 3 (ఇలస్ట్రేటెడ్ ఇమేజ్ చూడండి):
Two మీరు ఈ రెండు జంపర్లను తీసివేస్తే, మీరు మైక్రోకంట్రోలర్ నుండి ఎనేబుల్ మరియు డిసేబుల్ సిగ్నల్ను ఇన్పుట్ చేయాలి, చాలా మంది వినియోగదారులు రెండు జంపర్లను తొలగించి మైక్రోకంట్రోలర్ నుండి సిగ్నల్ను వర్తింపచేయడానికి ఇష్టపడతారు.
Jump మీరు రెండు జంపర్లను ఉంచినట్లయితే OUT1 నుండి OUT4 వరకు ఎల్లప్పుడూ ప్రారంభించబడుతుంది. OUT1 మరియు OUT2 కోసం ENA జంపర్ గుర్తుంచుకోండి. OUT3 మరియు OUT4 కోసం ENB జంపర్.
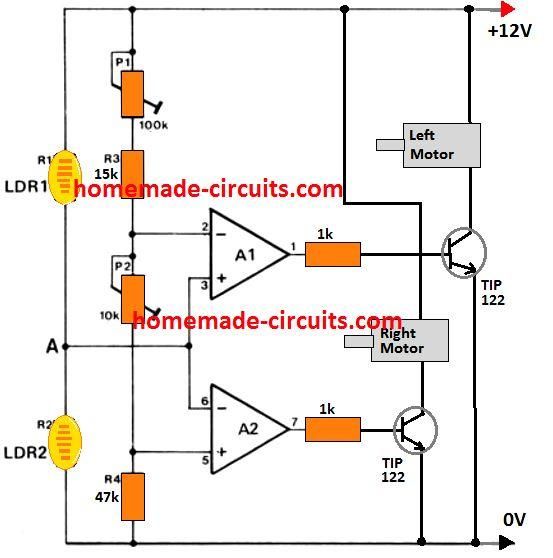
ఇప్పుడు మనం ప్రాక్టికల్ సర్క్యూట్ చూద్దాం, మనం ఎలా చేయగలం ఇంటర్ఫేస్ మోటార్లు, ఆర్డునో మరియు డ్రైవర్ మాడ్యూల్కు సరఫరా.
స్కీమాటిక్:

మీరు కోడ్ను సముచితంగా మార్చి జాయ్స్టిక్ను జోడిస్తే పై సర్క్యూట్ బొమ్మ కార్ల కోసం ఉపయోగించవచ్చు.
మీరు L289N మాడ్యూల్కు శక్తినివ్వాలి మరియు మాడ్యూల్ విన్ టెర్మినల్ ద్వారా ఆర్డునోకు శక్తినిస్తుంది.
పై సర్క్యూట్ రెండు మోటార్లు గడియారం వారీగా 3 సెకన్ల పాటు తిరుగుతుంది మరియు 3 సెకన్ల పాటు ఆగుతుంది. ఆ తరువాత మోటారు యాంటీ సవ్యదిశలో 3 సెకన్ల పాటు తిరుగుతుంది మరియు 3 సెకన్ల పాటు ఆగుతుంది. ఇది చర్యలో హెచ్-బ్రిడ్జిని ప్రదర్శిస్తుంది.
ఆ తరువాత మోటారు రెండూ నెమ్మదిగా సవ్యదిశలో నెమ్మదిగా తిరగడం ప్రారంభిస్తాయి, క్రమంగా గరిష్ట స్థాయికి పెరుగుతాయి మరియు క్రమంగా వేగాన్ని సున్నాకి తగ్గిస్తాయి. ఇది పిడబ్ల్యుఎం చేత మోటారుల వేగ నియంత్రణను ప్రదర్శిస్తుంది.
కార్యక్రమం:
//----------------Program developed by R.GIRISH--------------//
const int Enable_A = 9
const int Enable_B = 10
const int inputA1 = 2
const int inputA2 = 3
const int inputB1 = 4
const int inputB2 = 5
void setup()
{
pinMode(Enable_A, OUTPUT)
pinMode(Enable_B, OUTPUT)
pinMode(inputA1, OUTPUT)
pinMode(inputA2, OUTPUT)
pinMode(inputB1, OUTPUT)
pinMode(inputB2, OUTPUT)
}
void loop()
{
//----Enable output A and B------//
digitalWrite(Enable_A, HIGH)
digitalWrite(Enable_B, HIGH)
//----------Run motors-----------//
digitalWrite(inputA1, HIGH)
digitalWrite(inputA2, LOW)
digitalWrite(inputB1 , HIGH)
digitalWrite(inputB2, LOW)
delay(3000)
//-------Disable Motors----------//
digitalWrite(Enable_A, LOW)
digitalWrite(Enable_B, LOW)
delay(3000)
//-------Reverse Motors----------//
digitalWrite(Enable_A, HIGH)
digitalWrite(Enable_B, HIGH)
digitalWrite(inputA1, LOW)
digitalWrite(inputA2, HIGH)
digitalWrite(inputB1 , LOW)
digitalWrite(inputB2, HIGH)
delay(3000)
//-------Disable Motors----------//
digitalWrite(Enable_A, LOW)
digitalWrite(Enable_B, LOW)
delay(3000)
//----------Speed rise----------//
for(int i = 0 i < 256 i++)
{
analogWrite(Enable_A, i)
analogWrite(Enable_B, i)
delay(40)
}
//----------Speed fall----------//
for(int j = 256 j > 0 j--)
{
analogWrite(Enable_A, j)
analogWrite(Enable_B, j)
delay(40)
}
//-------Disable Motors----------//
digitalWrite(Enable_A, LOW)
digitalWrite(Enable_B, LOW)
delay(3000)
}
//----------------Program developed by R.GIRISH--------------//
రచయిత యొక్క నమూనా:

ఈ L298N DC మోటారు డ్రైవర్ ప్రాజెక్ట్ గురించి మీకు ఏవైనా ప్రశ్నలు ఉంటే, వ్యాఖ్య విభాగంలో సంకోచించకండి, మీకు శీఘ్ర సమాధానం లభిస్తుంది.
మునుపటి: డంప్ కెపాసిటర్ ఉపయోగించి బహుళ బ్యాటరీ ఛార్జర్ సర్క్యూట్ తర్వాత: ఆర్డునో ఉపయోగించి జాయ్ స్టిక్ 2.4 GHz RC కారును నియంత్రించింది